1。初期条件:
* 初期速度(V₀): オブジェクトが傾斜の下の初期速度から始まる場合、すでに運動エネルギーを持っています。初期速度が高いほど、初期運動エネルギーが高くなります。
* 初期高さ(H₀): オブジェクトが傾斜で始まるほど、最初はポテンシャルエネルギーが増えます。このポテンシャルエネルギーは、オブジェクトがスライドすると運動エネルギーに変換されます。
2。傾斜角(θ):
*より急な角度(θ)は、重力の成分が大きいことを意味し、オブジェクトを傾斜を引き下げ、より速い加速と最終速度が高くなり、運動エネルギーが高くなります。
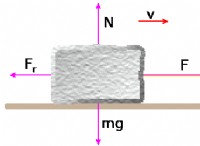
3。摩擦:
* 摩擦係数(μ): オブジェクトと傾斜の間の摩擦の量は、摩擦によるエネルギー損失に影響します。摩擦係数が高いほど、エネルギー損失が大きくなり、最大運動エネルギーが低下します。
* 通常の力(n): 通常の力は、傾斜に垂直な重力の成分に比例します。正常な力が大きいほど摩擦が大きくなるため、最大速度エネルギーが低くなります。
4。走行距離:
*オブジェクトが傾斜を長く移動するほど、加速する時間が長くなり、最終速度が高く、運動エネルギーが高くなります。
最大運動エネルギーの計算:
最大運動エネルギーを計算するには、次の手順を使用できます。
1。開始点でのポテンシャルエネルギーを計算します:
* PE =MGH₀、ここで、「M」は質量、「G」は重力による加速、「H₀」は初期の高さです。
2。摩擦による作業を計算します:
* w_friction =μn* d、ここで、「μ」は摩擦係数、 'n'は通常の力、「d」は移動距離です。
3。行われたネット作業を計算します:
* w_net =pe -w_friction
4。ワークエネルギー定理を適用します:
* w_net =ke_final -ke_initial
* ke_final =w_net + ke_initial
重要なメモ:
* エネルギーの保存: 摩擦のないシステムでは、総機械エネルギー(電位 +速度論)は一定のままです。したがって、最大運動エネルギーは初期のポテンシャルエネルギーに等しくなります。
* 実際のシナリオ: 実際の状況では、摩擦が常に存在するため、最大の運動エネルギーは初期のポテンシャルエネルギーよりも少なくなります。
例:
0.2の摩擦係数を持つ30度の傾斜で2メートルの高さから始まる1 kgブロックを想像してください。最大の運動エネルギーを見つけましょう:
1。 pe =mgh₀=(1 kg)(9.8 m/s²)(2 m)=19.6 j
2。 w_friction =μn*d =0.2*(1 kg*9.8 m/s²*cos(30°))*d。これを計算するには、移動した距離(d)を知る必要があります。
3。 ke_final =PE -w_friction + ke_initial。最大の運動エネルギーを見つけるには、初期運動エネルギー(ke_initial)と移動距離(d)が必要です。
初期速度、移動距離、摩擦係数の特定の値がある場合はお知らせください。より正確な計算を提供できます。