物理学者は、単純な構成部品間の相互作用の通常のルールを修正することにより、ロボットの移動の重要な問題を解決しました。
一連の形状を循環しながら、奇妙な車輪が急ででこぼこした地形を押し上げます。
サミュエル・ベラスコ/クアンタ・マガジン
はじめに
アムステルダムの物理学研究室には、小刻みに動かすと自然に上り坂を転がることができる車輪があります。
この「奇妙なホイール」は単純に見えます。6 つの小さなモーターがプラスチックのアームとゴムバンドで連結され、直径約 6 インチのリングを形成しているだけです。モーターの電源がオンになると、もがき始め、複雑な押しつぶしたり伸ばしたりする動作を実行し、時折空中に飛び上がりながら、でこぼこした発泡スロープをゆっくりと登っていきます。
「とても遊び心があると思います」と、ドイツのドレスデンにあるマックス・プランク複雑系物理学研究所の生物物理学者、リカール・アラート氏は言う。彼はこの車輪の製造には関与していない。 「とても気に入りました。」
奇数輪の型破りな移動モードは、最近の傾向を表しています。物理学者は、単純なルールに従う単純な部品から組み立てられたロボットに有用な集団行動を自発的に出現させる方法を見つけています。 「私はこれをロボット物理学と呼んでいます」とジョージア工科大学の物理学者ダニエル・ゴールドマンは言いました。
生物の最も基本的な行動の 1 つである移動の問題は、生物学者も技術者も同様に長い間関心を集めてきました。動物が障害物や険しい地形に遭遇したとき、私たちは本能的にこれらの課題を大股で乗り越えますが、それをどのように行うかはそれほど単純ではありません。エンジニアは、現実世界の環境を移動するときに倒れたり前によろめいたりしないロボットを構築するのに苦労してきましたが、遭遇する可能性のあるすべての課題を予測してロボットをプログラムすることは不可能です。
アムステルダム大学の物理学者コランタン・クーレー氏とシカゴ大学のヴィンチェンツォ・ヴィテッリ氏とその共同研究者によって開発され、最近のプレプリントで説明されているこの奇妙な車輪は、移動に対する非常に異なるアプローチを具体化したものである。ホイールの上り坂の動きは、各構成部品の単純な振動運動から生じます。これらの部品は環境について何も知りませんが、ホイール全体は不均一な地形を補うために小刻みな動きを自動的に調整します。
物理学者たちはまた、常に片側に跳ね返る「奇数のボール」と、衝撃によるエネルギーを吸収する場所を制御する「奇数の壁」も作成しました。 これらのオブジェクトはすべて、研究者らが 2 年前に特定した、伸ばす動作と潰す動作の間の非対称な関係を記述する同じ方程式から生じています。
スイス連邦工科大学ローザンヌ校のバイオロボット学者、オーケ・アイスピールト氏は、「これらは確かに予想外の行動だ」と語った。 Coulais と Vitelli は、最新の論文が査読中であるためコメントを拒否しました。
新しい研究は、より堅牢なロボットの設計を導くだけでなく、生命システムの物理学への洞察を促し、新しい材料の開発を促す可能性があります。
奇妙な出来事
この奇妙な車輪は、「活性物質」の物理学に関するクーレーとヴィテッリの過去の研究から生まれました。これは、細菌の群れ、鳥の群れ、特定の人工物質など、その構成部品が環境からエネルギーを消費するシステムの総称です。エネルギー供給は豊かな行動を生み出しますが、同時に活性物質の制御を困難にする不安定性にもつながります。
物理学者は歴史的に、相反性の原理に従う必要があるエネルギーを節約するシステムに焦点を当ててきました。そのようなシステムが A から B に移動することでエネルギーを得る方法がある場合、システムを B から A に戻すプロセスには、同じ量のエネルギーが必要になります。しかし、内部からのエネルギーの絶え間ない流入により、この制約はもはや当てはまりません。
Nature Physics の 2020 年の論文で , Vitelli と数人の共同研究者は、非相反的な機械的特性を持つ活性固体の研究を開始しました。彼らは、異なる種類の伸張動作と押しつぶし動作の関係に非相反性が現れるという理論的枠組みを開発しました。 「私にとって、それは単なる美しい数学的枠組みでした」とマサチューセッツ工科大学の生物物理学者、ニクタ・ファクリは言いました。
固体の片側を押しつぶして、垂直方向に外側に膨らませるとします。 45 度回転した軸に沿って伸ばしたり縮めたりして、ひし形に変形させることもできます。通常の受動固体では、これら 2 つのモードは独立しています。ソリッドを一方向に変形しても、どちらの対角線にも変形しません。
研究者らは、アクティブな固体では、2 つのモードが非相反結合を持つ可能性があることを示しました。固体を一方向に押しつぶすと、45 度回転した軸に沿って押しつぶされますが、この対角線に沿って押しつぶすと、元の軸に沿って押しつぶされるのではなく、引き伸ばされます。数学的には、これら 2 つのモード間の結合を表す数値は、一方の方向では正、逆方向では負になります。符号の違いのため、物理学者はこの現象を「奇妙な弾性」と呼んでいます。
奇妙な弾性固体では、変形を元に戻すことは、変形を引き起こした伸縮動作を元に戻すことほど簡単ではありません。その代わりに、固体を開始時の形状に戻す変形サイクルにより、固体に過剰なエネルギーが残る可能性があります。これにより、奇数輪の上り坂移動が可能になるなど、顕著な結果が得られます。
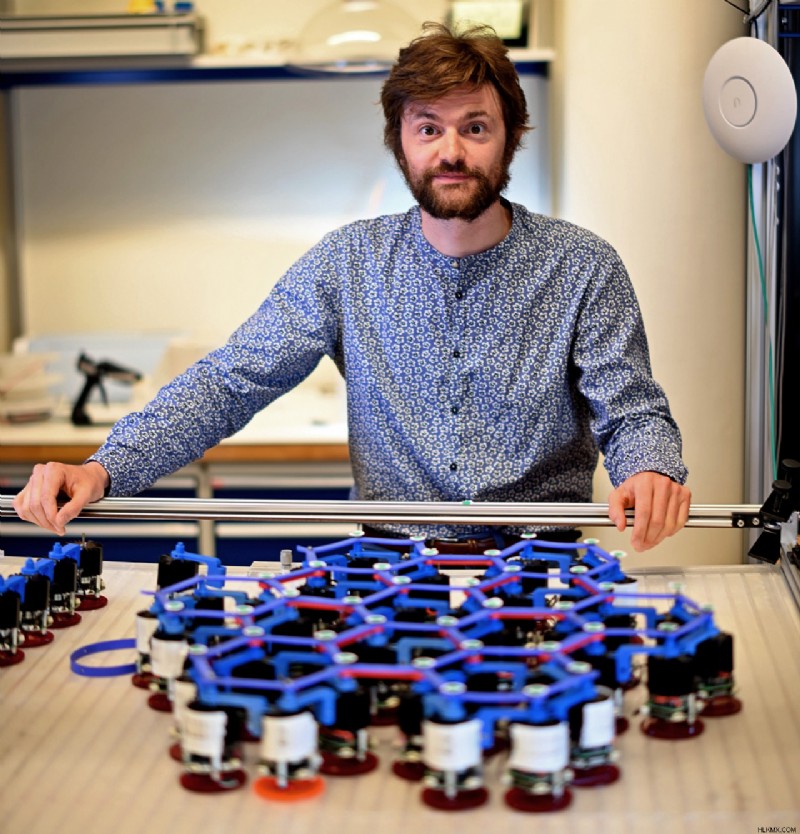
アムステルダム大学の Corentin Coulais 氏。
デビッド・ディクストラ
一方、実験家のクーレー氏は、それぞれにモーター、センサー、マイクロコントローラーが装備された一連の単純なモジュールで構成されるロボットの活動物質の非相反性を研究していました。これらの感知機能と制御機能により、Coulais はフィードバック ループを使用して各モジュールをプログラムし、隣接するモジュールの動きに非相反的に応答することができました。
オランダのライデン大学の元同僚である 2 人の物理学者は、奇妙な弾性の数学を具体化するロボット活性物質を開発するために協力しました。
異常な振動
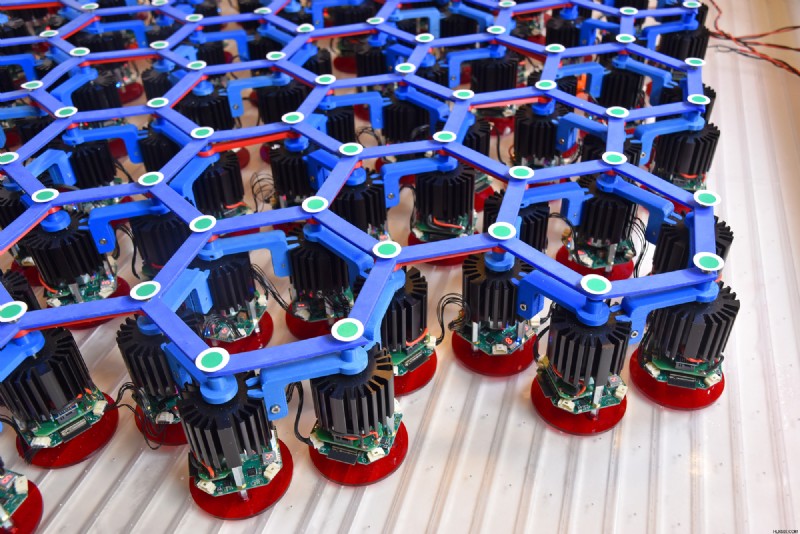
通常の弾性、つまり物質のバネ性は、物質の微視的な構成要素間のバネのような相互作用から現れるバルク特性です。 Coulais と Vitelli は、ロボット モジュール間の弾性的な相互作用に奇妙なひねりを加えようとしました。
新しい設計では、各モジュールは 2 本のプラスチック アームの回転を制御するモーターで構成されており、アームを引き戻すことで弾力性を与えるゴムバンドが付いています。研究者らは、アームを共有する 2 つのモジュールから始めました。モジュール上のセンサーとコントローラーは非相反フィードバック ループを実装しました。最初のモーターの時計回りの回転は 2 番目のモーターの時計回りのトルクを生成しますが、2 番目のモーターの時計回りの回転は 1 番目のモーターの反時計回りのトルクを誘発します。
この配置は本質的に不安定です。モジュールはそのまま放置しておくと永遠に静止したままになりますが、ほんのわずかな刺激でも終わりのない綱引きが発生します。モーターがどちらの方向に回転しても、もう一方のモーターとの相互作用により、モーターは反対方向に押し戻されます。モジュール間の結合が十分に強い場合、アームは振幅を増加させながら前後に振動し始めます。
2 つのモーター角度を表す軸を持つ 2D プロットでは、これらの増大する振動は外向きの螺旋として現れ、M.C. を下りるランナーのように各サイクルでエネルギーを獲得します。エッシャーの階段を登り、周回ごとにスピードを上げます。しかし、モーターが出せるトルクには限界があり、エネルギーは摩擦によって失われるため、振動の振幅は最終的には最高に達します。モーター角度の 2D プロットでは、らせん状の軌道は円に収束し、その後その経路を正確に戻り続けます。物理学者は、この自立的な一定振幅振動をリミット サイクルと呼んでいます。
モジュールのリミットサイクル振動は、複雑なシステムをしばしば悩ませるカオスに対する、安定した規則的な運動の勝利を表しています。 1 つの振り子がもう 1 つの振り子からぶら下がっている混沌とした「二重振り子」を考えてみましょう。その初期条件の小さな変化が、すぐに空間を通るまったく異なる軌道につながります。リミット サイクルはその逆の現象です。初期条件が異なっていても、最終的には同じ軌道が得られます。 Coulais と Vitelli の奇数モジュールの場合、最初にどのアームがどの方向に動かされたかに関係なく、システムは最終的に同じ定常状態の振動を示します。
この重要な機能により、リミットサイクル振動は、たとえば (単一の) 振り子のよく知られた周期運動よりも特殊になります。振り子の位置と速度の 2D プロットでは、その振動は閉ループの周りの軌道として表示されますが、異なる速度で振り子を振り始めると、振り子はより大きいまたは小さい円を描きます。リミットサイクル振動は、より堅牢です。異なる軌道で始まる多くの軌道は、まったく同じ軌道に収束します。システムがこの軌道から少しずつ遠ざかると、引き戻されます。
これらのリミットサイクル振動は、研究者らに活性物質の手に負えない力学を制御し、それを機能させる方法を提供しました。
運転中の様子
クーレーとヴィテッリが奇妙な物質の構成要素を設計したので、今度はそれらを組み立てる時が来た。多くのモジュールを正しい方法で接続すると、Vitelli が当初想定していた奇妙な弾性固体に似ることになります。これらのモジュールを共有アームで連結して車輪を形成したらどうなるでしょうか?
チームがモーターに電力を供給すると、ループが振動し始め、45度の角度で伸びたり縮んだりする同様の動きを織り交ぜた。ヴィテッリの奇妙な弾性理論における自己変形の 2 つのモードを行ったり来たりして切り替えました。隣接するモーターのリミットサイクル振動により、ホイール全体の共同運動にリミットサイクルが発生しました。エッシャーの階段が時計回りと反時計回りのラップの対称性を破るのと同じように、モーターのカップリングの奇妙さが車輪の運動方向を特定しました。一方はすべて下り坂、もう一方はすべて上り坂です。各リミット サイクル中に生成されるエネルギーにより、ホイールは地面を押し上げ、上方に回転します。
隣接するロボット モジュール間の奇妙な相互作用を利用して、奇妙な壁を構築することもできます。
コランタン・クーレー氏の厚意
なぜ車輪の上り坂移動がこれほど堅牢なのかを突き止めるのは難しい。それはまさにそのリミットサイクルが創発的な現象であり、個々のモジュールを精査したときには見られないからだ。カリフォルニア大学サンディエゴ校のロボット工学者ニック・グラビッシュ氏は、モーターの各ペアのリミットサイクル振動が車輪の可能な集合運動を大幅に制限しているのではないかと疑っている。彼は、低レベルの振動による集団運動の出現は生物学にも類似点があると指摘しました。「動物は相互に接続された多数の振動要素であり、それらは連携して動作する必要があります。」
Coulais と Vitelli は、衝突に対する奇妙な結合の影響も調査しました。彼らは、奇妙なボール(奇妙なモジュールから組み立てられた発射体)は、回転せずに発射されると常に特定の方向に跳ね返り、一方、奇妙な壁が発射体からのエネルギーを吸収する方向を制御できることを示しました。フランス、リヨンにある高等師範学校の物理学者、デニス・バルトロ氏は、これらの機能は新しい活物質の設計に役立つ可能性があると述べ、「次の大きなステップは、これらの機械を自己組織化する方法を見つけることだろう」と付け加えた。
ロボット物理学
最近の実験が行われるまでは、奇妙な相互作用が移動を引き起こすことは明らかではありませんでした。各モーターは隣接するモーターにのみ応答しますが、ホイールは前進します。このトップダウン制御の欠如は、指定されたリーダーなしで群れがどのように協力するのか、また神経系を持たない原始的な動物がどのように食物を求めるのかを理解しようとしている生物学者にとって特に興味深いものです。
奇数輪の創発的な移動が研究者にとって魅力的なのは、主に輪の構成要素が非常に単純であるためです。 「生命システムの複雑さの中でただ迷ってしまう可能性があります」とアラート氏は言う。彼は、リチャード・ファインマンの有名な言葉を指摘しました。「私が創造できないものは、私には理解できません。」
Coulais と Vitelli は、特定の生命システムを模倣することなく奇妙なモジュールを開発したため、生物学が同じ創発力学を利用したかどうかは未解決の問題です。カリフォルニア大学サンタバーバラ校の理論物理学者、M. クリスティーナ マルケッティ氏は、この結果を「非常に興味深い」と述べ、生物学におけるその役割の可能性を理解するための次のステップは、生きた細胞のような騒がしい環境でその挙動がどの程度持続するかを確認することであると述べた。
しかし、進化は問題に対する良い解決策を見つけることがよくありますが、機会を逃すこともあります。奇妙な車輪は真の目新しさかもしれません。バルトロ氏は、ロボット、機械、材料の設計において、生物インスピレーションには限界があると指摘しています。「羽ばたきを使って飛行機を作ろうとしたとしても、ノルマンディーからニューヨークまで歩くか泳ぐことになるでしょう。」

次の記事
脳には感覚を鈍らせる「低電力モード」がある