あなたが火星移民として首尾よく採用されたと想像してみてください。パイオニアであることを祝い、この赤い惑星に近づいた後、危険を察知して回避する (HDA) システムが搭載されていないことに恐怖を感じます。つまり、以前の戦士、MER-A、MER-B、フェニックスが経験したのと同じように、自由着陸を通過する必要があります。神の祝福がありますように。
搭載された HDA システムは、惑星着陸にとって重要です。ただし、いくつかの技術的な制限により、中国の嫦娥-3[1] を除くすべての着陸ミッションは、基本的に「盲目的」に着陸します。これまでに、さまざまな手法を使用したいくつかの試みが行われてきました。従来の取り組みは、主に、局所強度 [2]、テクスチャ [3]、形状 [4]、またはこれらの要素の組み合わせ [5] など、画像からの視覚的特徴の抽出に集中していました。しかし、そのようなアプローチは、その多様な形態のために岩石の検出には適していません。画像ベースの方法のもう 1 つのハードルは、画像自体を使用した勾配推定の失敗です。最近の別の研究では、ライダーを使用して危険を検出することが提案されています [6]。フラッシュ ライダーは、3D 地形図を生成できるセンサーの 1 つです。
搭載された HDA を研究する以前の研究では、視覚ベースの方法を使用して地上 (AGL) から 100 ~ 300 m で危険を検出するいくつかの初期のスキームがトリガーされました。しかし、将来の複雑な地形への着陸では、着陸機は「危険飽和」という深刻な窮状に直面する可能性があります。つまり、目に見える領域に安全な着陸地点がなく、十分な時間の余裕がなかったり、安全な場所を探すための燃料が残っていたりすることになります。サイト。直感的なアプローチは、HDA トリガーの高度を上げることです。 HDA の高度が上昇するにつれて、着陸機はより早いマニューバを達成することができます。これは将来の有人着陸に不可欠です。なぜなら、すべての危険を特定することは高高度での主な関心事ではなく、より大きな岩や急な斜面を特定して、おおよそ安全な場所を決定するためです。その後、最終降下フェーズでより正確な HDA を実行できます。嫦娥 3 号ミッションの成功は、高高度 HDA の効率性を示しています。
嫦娥 3 号に着想を得て、2 段階のオンライン危険検出戦略を設計しました。初期段階では、フラッシュライダーを使用してハザードマップを生成し、ランダーの形状や機械的な許容範囲などを評価して安全な地域を大まかに選択します。上記の要因を総合的に考慮して、最適なターゲット地域が安全な地域として選択されます。範囲。最初の HDA の実行は、必要な軌道調整に十分な時間を提供するために、電力の下降が始まるとすぐに開始する必要があります。最後の HDA は、最終段階でトリガーされます。最初の HDA によって選択された着陸地域に基づいて、このプロセスは、より正確で適切な車両規模の着陸地点を見つけることを目的としています。
私たちの仕事は主に最初の HDA に集中しています。従来の LIDAR ベースのハザード検出方法では、データム平面を適合させてオブジェクトの高さを推定していました。ただし、地形の起伏により、高高度で大きな平面をフィッティングすると、凹凸が劇的に滑らかになり、勾配が過小評価されます。代わりに、薄板スプライン (TPS) 補間とライダー フィルター技術に基づく堅牢なデータム サーフェス モデリング アルゴリズムを提案します。連続 TPS 曲面は、平面項とカーネルベースの正則化項の組み合わせとして定式化されます。曲げエネルギーを最小化することにより、表面のパラメータが最適化されます。データム サーフェスをモデル化する前に、マルチスケール モルフォロジカル フィルターを使用して LIDAR ノイズを除去します。危険性は、レーザー ポイントから TPS 表面までの距離の残留物によって評価されます。勾配は、TPS サーフェス自体によって直接推定されます。
さらに、新しいハザード評価機能を設計しました。残差と勾配の両方が着陸要件を満たしている場合に限り、着陸候補は安全です。最終的に選択された安全なサイトは、粗さと入射角が同時に最小になります。
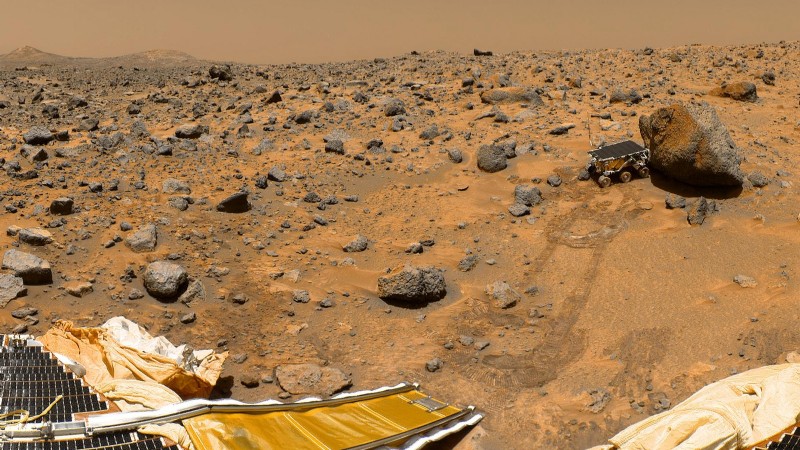
実際の LIDAR データとシミュレートされたプラットフォームでの結果は、提案された方法の効率を示しています。私たちはライダー プラットフォームを構築し、このプラットフォームと実際の火星データの両方で実験を行いました。
最先端の平面ベースの検出方法と比較して、私たちの方法はほとんどの危険を特定でき、提案された方法の優位性を示しています。欠点の 1 つは、崖の上面などの大きな平らなオブジェクトの場合、TPS サーフェスはそれらに非常に適合し、検出漏れにつながることです。しかし、これは TPS ピラミッドのスライド ウィンドウを拡大することで解決できますが、地形がぼやけます。ウィンドウ サイズと地形解像度のバランスを取る必要があります。それでも、現在の平面フィッティング検出戦略よりもはるかに優れています。
参考文献:
<オール>