アメーバの運動性構造:より深いダイブ
アメーバの動きは、アメーボの動きとして知られる動きは、内部構造とメカニズムの複雑な相互作用によって駆動される魅力的なプロセスです。 主要なコンポーネントの内訳は次のとおりです。
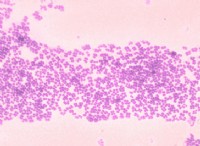
1。細胞質:
* ectoplasm: 細胞質の外層、透明でゲル状のようなものは、構造的なサポートを提供します。
* 小胞: 核、オルガネラ、および食物液胞を含む内側のより液体細胞質。
2。偽後足:
*細胞質のこれらの一時的な拡張は、細胞質のゲルソール状態の局所的な変化によって形成されます。
*彼らは「偽の足」として機能し、運動と食物の捕獲に不可欠です。
*その形状と形成に基づいて、さまざまな種類の偽下足底があります。
* lobopodia: 鈍い、指のような投影。
* Filopodia: 薄いスレッドのような投影。
* Rhizopodia: 分岐したネットのような投影。
3。アクチンとミオシン:
*これらのタンパク質は、細胞質の動的な変化に不可欠です。
* actin: 重合して解重合するマイクロフィラメントを形成し、擬似足底伸長の押しの力を生み出します。
* ミオシン: モータータンパク質として機能し、アクチンフィラメントと相互作用して、細胞の背面を引き込む収縮力を生成します。
4。アメーボのサイクル:
*アメーバの動きは、擬似足底層と撤回の連続サイクルです。
* 拡張子: アクチン重合は、擬似足の形成を促進します。
* 添付ファイル: 擬似足類は基板に準拠します。
* 収縮: ミオシンとアクチンの相互作用は細胞の背面に収縮し、アメーバを前方に引っ張ります。
* 再編成: 細胞質は新しいリーディングエッジに向かって流れ、サイクルが繰り返されます。
5。規制:
*さまざまな内部および外部信号は、アメーボの動きに影響します。
* 走化性: アメーバは化学勾配に向かって移動したり離れたりすることができ、食物を見つけたり、有害な物質を逃れたりすることができます。
* 機械的刺激: 表面との接触は、移動方向の変化を引き起こす可能性があります。
6。重要なメモ:
* AmoeBoidの動きは、擬似足底の形成のみに基づいたものではありません。 細胞質のストリーミングや内圧勾配の作成などの他のメカニズムも寄与します。
*アメーボの動きの正確なメカニズムはまだ調査中であり、多くの詳細はまだ完全には理解されていません。
要約すると、アメーバの運動性は、細胞骨格要素、タンパク質相互作用、およびさまざまな調節メカニズムを含む複雑で動的なプロセスです。この複雑なシステムを理解することで、これらの単細胞生物の顕著な適応性と可動性を理解することができます。