その理由は次のとおりです。
* クラス1レバー: 支点(ピボットポイント)は、努力(力が適用される)と負荷(移動中のオブジェクト)の間にあります。この配置により、機械的な利点が可能になります。つまり、より重い荷重を動かすために、より遠い距離にわたってより少ない力を適用することができます。
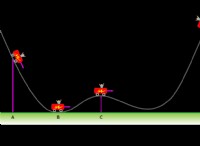
例: シーソーは、クラス1レバーの典型的な例です。支点は真ん中にあり、努力は一方の端(プッシュ)に適用され、負荷はもう一方の端(あなたの友人)にあります。
その他のレバークラス:
* クラス2レバー: 負荷は、支点と努力の間にあります(たとえば、手押し車)。この配置は力の乗数を提供し、重い負荷を持ち上げやすくします。
* クラス3レバー: この努力は、支点と負荷の間にあります(たとえば、ピンセットや釣り竿)。この配置は速度と距離を増加させますが、負荷を動かすにはより多くの力が必要です。