「ガリレオは 300 年以上前に反対のことを証明しましたが、ノミが人間と同じくらいの大きさであれば、1,000 フィートも空中に飛び上がることができると人々は今でも信じています」と、生物学者の J.B.S. Haldane の 1926 年の楽しいエッセイで、正しいサイズについて .ガリレオの平方立方体の法則は、オブジェクトが大きくなるにつれて (たとえば、線形係数 n )、その表面積と体積ははるかに速く増加します (n) そしてn 、 それぞれ)。架空の 6 フィートのノミの跳躍する筋肉は、そのスケールアップした重量に決して追いつくことができなかった、と Haldane は説明した.
表面積と体積がオブジェクトの直線寸法よりも速く増加するという事実は、生物学に深く広く影響を及ぼします。すべての生物は、餌を食べ、呼吸し、移動しますが、それらに使用されるさまざまなメカニズムは、特定のサイズの領域内で最適に機能する生物物理学に依存しています。生物が大きくなったり小さくなったりすると、その規模に適したソリューションが必要になります。
Haldane のエッセイ以来、生物がサイズの課題にどのように対処しているかについては、膨大な文献が調査されてきましたが、発見は続いています。最近、科学の論文 ノミ、アリ、シャコ、その他の小さな生き物が飛び跳ねたり、爪や顎で攻撃したりすると、ときに爆発的な力が放出されることを説明し、定量化しました。大きな筋肉がなく、負荷をかけたバネのような体の構造材料の機械的特性を利用します。このような性能を達成するための進化の創意工夫は、人間が最終的に独自のツールや武器を発明する設計を予期しており、今日の研究者やエンジニアに、より高性能なロボットの研究に刺激を与えています。
運動と呼吸
バイオメカニクス研究における古典的な研究では、生物に対するサイズの影響が調査されてきました。たとえば、大きくて重くなると、動物の移動や姿勢に問題が生じます。
ブラウン大学のバイオメカニクス研究者であるトーマス・ロバーツは、「マウスからゾウに移行すると、骨の量 (最終的にその強度を決定する断面積) は、動物の質量ほど速くは増加しません。骨が折れるのを防ぐために、大型動物はより直立した円柱状の姿勢をとり、体重が骨の負荷を支える部分によりよく分散されるようにしています。キリンの背が高く、ほぼ垂直な構造を考えてみてください。
逆に、物体のサイズが小さくなると、その質量は断面積よりも速く減少します。ロバーツ氏によると、アリは外骨格とそれに付着する筋肉が幾何学的に大きな生物よりも不釣り合いに強いため、自分の体重の数倍を簡単に運ぶことができます。
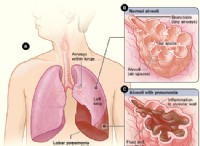
サイズは、動物の呼吸にも影響します。昆虫のような小さなものは、各細胞の代謝ニーズに直接対応するために、体を通る気管チューブ内の酸素の拡散に依存していますが、大きな生き物は、組織に十分な酸素を供給するために、肺や鰓と活発な循環系を必要とします。重要なのは、細胞の代謝廃棄物を除去することです)。 1997 年に Science に掲載された、重要ではあるが物議を醸した論文で 、現在サンタフェ研究所にいるジェフリー・ウェスト、ニューメキシコ大学のジェームズ・ブラウン、およびアリゾナ大学のブライアン・エンキストは、これらの分岐循環ネットワークの幾何学がクライバーの法則として知られるパターンを説明できると主張しました:小さなハエからの代謝率大きなシロナガスクジラは、質量が 3/4 乗されたスケールで表示されます。シロナガスクジラとショウジョウバエの細胞はほぼ同じサイズですが、クジラの細胞の代謝率は低くなります。 West、Brown、および Enquist は、これらの枝分かれした酸素および栄養素の送達システムの形状が体の大きさに応じてどのように変化するかに関係があると主張しました.
気管チューブへの酸素の拡散が昆虫の呼吸には機能するが、より大きな動物には機能しないように、他の生物学的設計戦略は特定のサイズではうまく機能しますが、より大きなまたはより小さなものでは扱いにくくなります.アリ、ロブスター、その他の多くの無脊椎動物は、キチン質の外骨格で体を支えていますが、はるかに大きな生物の場合、骨の多い内部骨格がより良い解決策でした。大きな外骨格は、拘束力が強すぎて重くなるか、弱くなりすぎて破損しやすくなります.
マッスル、スプリング、ラッチ
筋力は、スケールが重要なもう 1 つの領域です。海綿のような単純な動物を除いて、ほとんどすべての多細胞動物は筋肉に依存して動き、それらのすべての筋肉は何らかの形の収縮繊維を使用します。この繊維ではアクチンタンパク質とミオシンタンパク質のフィラメントが互いに引っ張られて力が発生します。筋肉は、1 キログラムあたり約 100 から 300 ワットの電力を生成できます (電力は、単位時間あたりに伝達されるエネルギー量です)。
しかし小動物は、筋力だけでは解決できない問題に直面しています。たとえば、走っているとき、小動物の脚が地面に接触するのは、各ステップの非常に短い時間だけです。これにより、各ストライドが放出できるエネルギー量が制限されます。
この問題に対処するために、多くの小動物は体に柔軟な構造をバネとして使用し、射手の弓のようにコックして解放することができます.ばねにより、小動物はゆっくりとエネルギーを蓄え、一度に放出することができるため、その力が増幅されます。

たとえば、フロッグホッパーと呼ばれる昆虫は、足がコオロギやバッタよりもはるかに短いにもかかわらず、並外れた跳躍力を発揮します。その秘密は、足の筋肉を使って胸部を包むキチン質の外骨格を曲げることであり、バネまたは弓として機能します。ラッチは船首に蓄えられたエネルギーを保持します — 1 キログラムあたり最大 65,000 ワットです。掛け金が外れると、外骨格は跳ね返って元の形状に戻り、フロッグホッパーを体長の 100 倍投げ飛ばすほどの強力なジャンプを放ちます。
この弾力性のあるソリューションは、ジャンプ以外にも機能します。トナカイアリの頭はキチン質の外骨格で覆われており、頭の中の筋肉は射手の弓のように曲がることができます。弓が解放されると、1 キログラムあたり 200,000 ワットもの電力が発生し、時速 140 マイル以上の速度で不運な獲物を捕らえると、下顎がパチンと閉まります。捕食者に直面すると、トラップジョー アリは大顎を地面に押し付けて空中に飛び上がり、素早く安全な場所に逃げることもできます。
泉の利用は昆虫に限らない。カエルがしゃがむと、脚の筋肉が長いアキレス腱をバネのように伸ばしてエネルギーを蓄えます。その蓄積された緊張の解放がカエルの跳躍を促進すると、ロンドン大学王立獣医大学の古ロボット研究者であるクリストファー・リチャーズは述べた。ジャンプに使用される多様な骨盤の形状と脚のプロポーション.
しかし、カエルが蓄えられた力を解放するために使用する掛け金については、依然として激しい議論の対象となっています。 「カエルの解剖学的ラッチを発見した人は誰もいません。私の知る限り、脊椎動物のラッチを見つけた人はいません。」
ラッチは、ほんの一握りの昆虫と甲殻類のシステムについてのみ考え出されました.甲殻類の外側のクチクラや昆虫の外骨格で作られた簡単にアクセスできるスプリングとは対照的に、ラッチ機構は通常動物の体内にあるため、ラッチはスプリングよりも見つけにくい.ブリストル大学のバイオメカニクス研究者兼エンジニアである Gregory Sutton は、残念ながら、解剖によって繊細なバネとラッチのシステムが破壊され、生体内でどのように機能するかを判断することが難しくなっていると説明しています。通常、研究者は特定されたスプリングから突然力が解放されることからラッチの存在を推測することになります。 「何かがシステムを、筋肉がばねを伸ばすモードから、ばねが反動して力を加えるモードに切り替える必要があり、その巨大な動きに力を与えます」とサットンは言いました.
最初に発見されたラッチはバッタのもので、1977 年にスコットランドのセント アンドリュース大学のウィリアム ジェームズ ハイトラーによって記述されました。バッタは、幾何学的ラッチと呼ばれるものを使用します。足の反対側の筋肉はペアで機能します。まず、脚を完全に曲げると、脚の大きな筋肉がバネに負荷をかけ、小さな筋肉が膝関節を安定させます。関節をわずかに動かすと、小さな筋肉が 2 つの筋肉のモーメント アームに変化を引き起こし、関節を制御不能に回転させてジャンプを開始させます。
理想化された泉を越えて
小さな生き物が使用するバネとラッチのシステムは何十年にもわたって研究されてきましたが、科学者の理解には深刻な弱点がありました. 「これまで私たちは、エネルギーを蓄え、力を解放する能力が無制限であるかのように、スプリング システムを大部分扱ってきました」と Roberts 氏は説明します。関係するスプリングの質量が体重に比べて無視できる場合、これは許容できる仮定です。しかし、どのようなバネにも機械的な制約があり、エネルギーを放出するときは、それ自身の質量を動かさなければならず、それによってバネの力の出力が必然的に減少し、移動する物体の速度に比例する、とロバーツ氏は述べた。小規模なシステムでは、ばねの質量が総質量のかなりの部分になることが多く、考慮に入れる必要があります。
ラッチも、バネを瞬時に解放するかのように、理想的な方法でモデル化されました。しかし、ばねに蓄えられたエネルギーをラッチが解放する速度が重要であることが判明しました。それは、ばねにかかる負荷がどれだけ速く加速できるかを決定する、とリチャーズは言いました。動物が生体力学的システムのラッチを解放する速度が制限されている場合、動物のパフォーマンスも制限されます.
4 月 26 日の 科学 この論文では、エンジニア、物理学者、生理学者、バイオメカニクスの研究者、および材料科学者の学際的なチームが、筋肉、ラッチ、およびスプリングのこれらの実際の (理想化されたものではなく) 特性を明示的に使用し、これらの特性がどのように変化するかを数学的に説明する新しい理論モデルを提示しました。パフォーマンスを最適化するには、コンポーネントを相互に調整する必要があります。
「私にとってここでの大きなブレークスルーは、力の道をたどることができるようになったことです」と、この論文の上級著者であり、運動の力学を研究しているデューク大学の准教授であるシーラ・パテックは述べています。 「どのシステムがスプリングとラッチによって管理されるべきか、またどのシステムがそれから恩恵を受けないかを知ることができ、これまで意味がなかった生物学の古典的なスケーリング [問題] をより適切に処理することができます。」
シャコとロボット
パテックは、2002 年以来、サム スプリッターとしても知られるシャコの行動と生体力学を研究してきました。シャコは爪楊枝ほどの大きさのハンマーのような爪を持つ小型の甲殻類で、カタツムリの殻を割るために (またはカマキリの指を切り開くために使用します)。不注意な人間のハンドラー)。
「私たち [人間] は残りの人生で 2 本のつまようじでカタツムリの殻を真剣に叩いていて、カタツムリの殻を壊すことはありませんよね?」パテックは言った。しかし、彼女と彼女の同僚が示したように、シャコは爪に動力を与えるラッチとバネのシステムのおかげでそれを行うことができます.筋肉はキチン質の外骨格バネに抵抗を負荷し、まだ特性化されていないラッチで所定の位置に保持されます。次にラッチが解放され、スプリングがハンマーを毎秒最大 30 メートルの速度で外側に加速します。 「彼らの打撃は、銃の [バレル] 内の弾丸の加速 (10 m/s) に似ています」とパテックは電子メールで明らかにしました。

生物学者は、筋肉ができることとできないことに注目しすぎて、ぜんまい自体をほとんど無視してきた、とパテックは説明した。 「ハンマーを押したときの材料の挙動、そしてもちろん、ラッチの動作を調べる必要があります」とパテックは述べています。チームがこれらの質問を論文に正式に提示し、問題について話すための語彙ができたので、彼らと他の人々は現在、さまざまな生物学的および工学的システムにわたるラッチとスプリングの多様性を調査しています.
たとえば、Science の別の共著者 論文では、メリーランド大学カレッジパーク校の機械エンジニアであるサラ・バーグブライターが、捜索救助 (地震後に倒壊した建物のがれきの中を進む場合など)、宇宙探査、医療用途など、さまざまな用途向けのマイクロロボットを設計しています。 (小さなロボットを丸薬に飲み込んで、腸管の生検を採取することができます)。これらの小さなロボットはすべて、十分なパワーで移動、ジャンプ、または穴を開ける必要があります。このアイデアは、自然から学んだ教訓の一部を使用して小型ロボットの設計を改善することであると、筆頭著者であり、マサチューセッツ大学アマースト校の物理学者であり材料科学者でもある Mark Ilton 氏は説明します。
ペンシルベニア州立大学の共著者で生物学者のスザンヌ・コックス氏によると、歴史的に、生物学的システムは工学的システムよりも優れた性能を発揮しており、この新しいモデルはロボットが追いつく道を開くかもしれない.生物学は生物と生息地の点で非常に多様ですが、材料の巨大なツールボックスはありません、とパテックは言いました.進化の歴史を通じて、わずか 4 つの高分子材料 — セルロース (植物内)、キチン、コラーゲン、およびレシリン (昆虫に見られる弾性タンパク質) — が、生物の機械システムの出力を最大化するために豊富な方法で組織化または形成されてきました。と彼女は説明した。
エンジニアリングポリマー科学の側では、それは完全に反対です。パテックによると、材料科学者はツールボックスに大量の材料を持っていますが、これらの材料を相互接続する方法や、最適な性能を得るために材料を成形する方法については、一般的にあまり調査していません. 「基本的に、私たちが開発したフレームワークにより、これらのジャンプ システムのデザイン スペースを探索できます」と Bergbreiter 氏は付け加えました。
正しいトリックに適したサイズ
バネは生物学全体で有用ですが、モーター (ロボットの場合) と筋肉 (動物の場合) とバネとラッチのシステムの長所と短所は、サイズによって異なるバランスになります。一般に、スプリングとラッチはサイズが小さいほど有利です。負荷がかかる質量が増加し、慣性によってスプリングの効果が低下するにつれて、それらの利点は明確ではなくなります。
ジョージア工科大学の生体力学エンジニアである Gregory Sawicki は、次のように述べています。 「体が大きければ、基本的にモーターからスプリングと同じ性能を引き出すことができます。したがって、モーターの方が汎用性が高いため、モーターを選択する場合があります。」特に、モーターまたは筋肉は、ユーザーにより多くの制御を提供します。 「エネルギーの流れをより注意深く制御したい場合、これらの弾道ばねシステムを扱うのは困難です」と彼は説明しました。
バネのもう 1 つの欠点は、バネとラッチのシステムを性能限界まで押し上げる有機体が破損を心配しなければならないことです。 Patek は、シャコの場合、自己破壊を回避するという問題は深刻であると指摘しました。 「彼らは体からエネルギーを取り出さなければなりません [そして] それが戻って脚の筋肉を引き裂かないように努めなければなりません.」と彼女は言いました.
シャコ、トナカイアリ、フロッグホッパーなどの小さな生き物も、バネが壊れる心配があります。これらの動物は、生涯を通じて手足に使用するスプリングとラッチのセットが 1 セットしかありません。バネを壊すと命取りになりかねません。
昆虫が壊れないようにする秘訣の 1 つは、昆虫の翼の蝶番や気管にあるレシリンと呼ばれるゴム状のタンパク質にあるようです。レシリンは、キチンの下の薄い層で構成されているクチクラ スプリングにも見られます。実際、キチンとレシリンの層は、角と木、または革と木で作られたものなど、数百年前の射手の複合弓のデザインに似ています。複合弓は「損傷に強く、機械的特性を失うことなく繰り返し使用できます」とサットンは説明します。さまざまな素材を重ねることで、小さなひび割れが広がるのを防ぎ、損傷を抑え、壊滅的な状態になる前に動物にひび割れを修復する機会を与えます。合成弓の設計は、1545 年にエリザベス 1 世女王の家庭教師であり、ケンブリッジの学者であるロジャー アッシャムによって記述されたとサットンは指摘し、その歴史家の友人は、古代の弓の設計と昆虫の外骨格の微細構造との間の類似性を最初に発見した.
生物が小さくなるにつれて、破損はより大きな問題になります。その結果、動物が掛け金やバネを最適に利用できる体の大きさには、大きすぎず小さすぎないスイート スポットがあるようです。 Haldane はエッセイの中で、立方体の法則と仮説上の巨大ノミの相対的な筋肉効率の意味について論じていました。しかし、パテックと同僚の研究に照らしてみると、ノミの跳躍能力の本当の限界は、ノミの小さなばね (たとえば、シャコの頑丈なばねよりもはるかに小さい) が、それほど多くのストレスにしか耐えられないことにあるようです。
「信じられないほど小さなバネを壊れずに作るのは非常に難しい」とサットンは説明した。 「これが、ノミが実際にはそれほど上手なジャンパーではない理由です。ノミのバネは、関連する力を処理するのに十分な大きさではないからです。」
この記事は ScientificAmerican.com に転載されたものです。