トルク は、力によって物体がどのように回転するかを説明する物理学および工学の基本的な概念です。力が直線加速度を引き起こすのと同じように、トルクは角加速度を引き起こします。トルクは、単純な機械、エンジン、ロボット工学、生体力学、および回転運動を伴うあらゆるシステムにおいて重要な役割を果たします。
重要なポイント:トルク
- トルク は力の回転に相当するものです。
- 軸またはピボット ポイントを中心にオブジェクトを回転させる力の傾向を測定します。
- トルクの記号は τ です。 (ギリシャ文字タウ)。
- トルクの SI 単位はニュートン メートル (N·m)です。 .
- トルクは力の大きさに依存します。 、回転軸からの距離です。 、 そして角度です。 力が適用される場所。
- トルクはモーメントと呼ばれることもあります。 特にエンジニアリングの文脈において。
- 静的なものがあります (角加速度を引き起こさない) および動的です。 (角加速度を引き起こす)トルク。
- トルク乗数 レバー、ギア、油圧システムを使用してトルクを増幅する
- エンジン内 、トルクは回転出力に関係し、加速に影響します。
- ロボット工学において 、トルクは、モーターが回転または持ち上げることができる負荷の量を決定します。
トルクとは何ですか?
トルク 物体を軸の周りに回転させる力の尺度です。これは大きさと方向の両方を持つベクトル量です。トルクは、単に押したり引いたりする強さだけではなく、どこにどのように力を加えるかにも関係します。
定義 :
トルクは、回転軸から離れた場所に加えられる力の回転効果です。
シンボル :
トルクの標準記号はτです。 (タウ)。
SI 単位 :
トルクの SI 単位はニュートン メートル (N・m) です。 。
1 N·m =1 kg·m²/s²
トルクとモーメント:それらは同じですか?
多くの場面でトルク そして瞬間 これは同じことを意味し、力の回転効果です。ただし、次のような違いがあります。
- 物理において , 「トルク」 とは通常回転力のことを指します。 角加速度を引き起こします。
- エンジニアリングおよび機械学 、 言葉瞬間 特に静的システムでよく使用されます。 .
- 「力のモーメント」はより広い用語であり、さまざまなタイプ(曲げモーメント、慣性モーメントなど)を指す場合があります。
語源と歴史 :
- トルクという言葉 ラテン語のトルケレに由来します。 、「ねじる」という意味です。
- 瞬間という用語 は勢いから来ています。 、レバレッジとローテーションの影響力との歴史的な関連性を反映しています。
トルクと関連する物理量
トルクと相互作用する物理量がいくつかあります。
トルクの計算式と説明
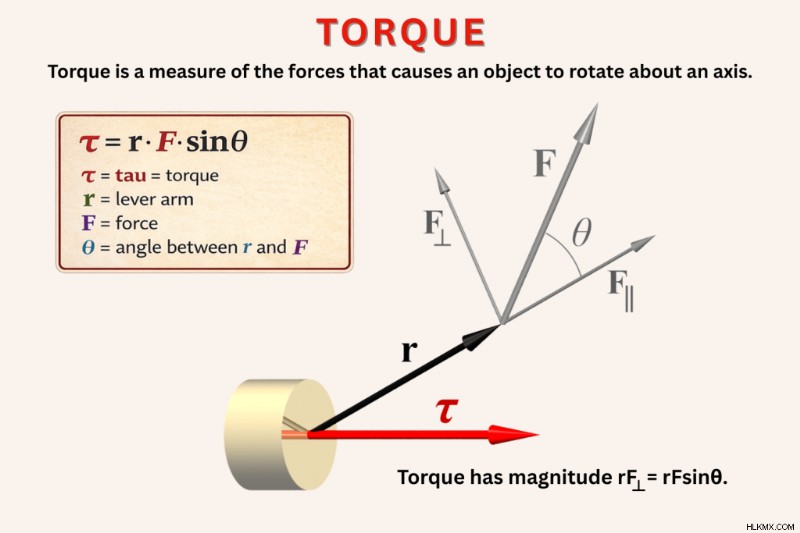
トルクの一般式は次のとおりです。
τ=r⋅F⋅sin(θ)\tau =r \cdot F \cdot \sin(\theta)
場所:
- τ はトルクです
- r はレバーアーム (回転軸から力の作用点までの距離)
- ファ は加えられる力です
- θ 力ベクトルとレバーアームの間の角度
特殊な場合
- 力が垂直の場合 レバーアームに対して、sin(90°)=1\sin(90°) =1 となるため、次のようになります。
τ=r⋅F\tau =r \cdot F
- 力が軸を通して加えられた場合 、 なんとトルクが無いのです。 :
θ=0°⇒τ=0\theta =0° \Rightarrow \tau =0
物理問題の例
問題 :レンチを使用して、0.3 m のハンドルの先端に 50 N の力を加えてボルトを緩めます。力はハンドルに対して垂直にかかります。トルクとは何ですか?
解決策 :
τ=r⋅F⋅sin(θ)\tau =r \cdot F \cdot \sin(\theta)τ=0.3 m×50 N×sin(90∘)\tau =0.3\ \text{m} \times 50\ \text{N} \times \sin(90^\circ)
τ =15 N・m
答え :15 ニュートン メートルのトルク。
静的トルクと動的トルク
トルクは静的または動的です オブジェクトが回転しているか、所定の位置に保持されているかによって異なります。この違いを理解することは、位置を維持するか動きを生み出すことが目標であるエンジニアリング、建設、ロボット工学、物理学の実験において重要です。
静的トルク とは角運動を生じないトルクを指します。 。これは、物体が平衡状態に保たれるように力が加えられたときに発生します。物体が回転していなくても、トルクは存在します。たとえば、ドアを動かさずに開いたままにするには、ドアの重さとヒンジの力に抵抗する静的トルクが必要です。
動的トルク 対照的に、 オブジェクトは角度的に回転または加速します。 。これは、エンジンがクランクシャフトに動力を供給したり、体操選手が回転したり、風車の羽根が風で回転したりするときに見られるトルクです。これは、エネルギー伝達、動き、回転速度の変化に関連しています。
トルク倍率とは何ですか?
トルク倍率 与えられた入力からのトルク出力を増加させる機械装置または装置です。高トルクが必要だが入力力が制限されている場合に便利です。
トルク増大の方法
- レバー :レバー アームを増やすとトルクが増加します (例:長いレンチを使用する)。
- ギア システム :ギア減速システムにより、速度が低下しながら出力トルクが増加します。
- 油圧乗算器 :加圧流体を使用して、増幅された回転力を伝達します。
- 遊星歯車セット :トルクと速度を調整するためのツールや車両で一般的
エンジンのトルク
エンジントルク エンジンがクランクシャフトに発生する回転力を指します。車の加速に直接影響します。 そして牽引能力も .
重要な概念
- 高トルク =より大きな回転力 =より強い押し込みで車を動かします。
- 馬力 トルクとエンジン速度 (RPM) の両方に依存します:
馬力=トルク (lb-ft) × RPM5252\text{馬力} =\frac{\text{トルク (lb-ft)} \times \text{RPM}}{5252}
- トルクは低から中回転数で最大になります。 ほとんどの内燃エンジンに搭載されています。
- 高性能車両は多くの場合、幅広いトルク カーブを目指しています。 柔軟性を高めるため。
ロボット工学におけるトルク
ロボット工学の分野 、トルクは、関節を回転させたり手足を動かしたりするモーターの能力を決定するために重要です。
アプリケーション
- サーボ モーター 荷物を持ち上げるのに必要なトルクに基づいて選択されます。
- 関節トルク 動きのスムーズさ、安定性、ペイロードの処理に影響します。
- ロボットでは多くの場合正確なトルク制御が必要です。 部品の過負荷や機械的故障の原因を避けるため
トルクは逆運動学にも関与します。 、強制フィードバック そして握力です。 ロボットマニピュレーターで。
トルクと回転平衡
物体は回転平衡にあります。 作用する正味トルクがゼロのとき。この状態では、物体はまったく回転していないか、または一定の角速度で回転しています。
∑τ=0\sum \tau =0
この原則は、橋、梁、シーソーなど、安定性が目標となる静力学において非常に重要です。
トルクのベクトルの性質
トルクはベクトル量です。 つまり、大きさと方向の両方があるということです。トルク ベクトルの方向は、力の方向と位置ベクトル (レバー アーム) によって異なります。
τ⃗=r⃗×F⃗\vec{\tau} =\vec{r} \times \vec{F}
右手の法則を使用します。 トルクの方向を見つけるには、r⃗\vec{r} に沿って指を向け、F⃗\vec{F} に向かってカールすると、親指がトルク ベクトルの方向 (面内または面外) を示します。
トルクと角運動量
トルクとは時間変化率です。 角運動量の:
τ⃗=dL⃗dt\vec{\tau} =\frac{d\vec{L}}{dt}
ここで、L⃗\vec{L} は角運動量です。これは、ニュートンの第 2 法則の回転類似物を形成します。外部トルクがない場合、 角運動量は保存されます。 .
トルクの生物学的応用
トルクは人間の動きの基本です。 。筋肉は関節から離れた骨に力を加え、回転運動を生み出します。
例:
- 上腕二頭筋 肘関節の周りにトルクを生み出す
- 大腿四頭筋 トルクを生成して膝を伸ばす
- 関節トルクを計算すると、スポーツ トレーニングや怪我の予防に役立ちます。
トルクの測定
トルクを測定する一般的な機器がいくつかあります。
- トルクレンチ :ボルトや機械的締結具に加えられたトルクを測定します。
- ダイナモメーター :エンジンからのトルクと出力を測定します。
- ひずみゲージ :回転部品の小さな変形を検出します。
- 回転トルク センサー :ロボット工学や機械でトルクをリアルタイムで監視するために使用されます。
単純な機械のトルク
多くの単純な機械は、力や機械的利点を高めるためにトルクに依存しています。
例:
- レバー ピボット周りのトルクを使用します。
- 歯車 調整可能な速度比でトルクを伝達します。
- 滑車 リフティング システムで力の方向を変え、トルクを分散する
- 車輪と車軸 システムは、トルクを工具や車両の動きに変換する
単位変換と非 SI 単位
特に安全性が重要な用途では、締めすぎや締めすぎを防ぐために正しい単位を使用してください。
トルクに関するよくある誤解
- トルクと力は同じです :トルクにより回転します。力は直線運動を引き起こします。
- レバーを長くすると常にトルクが大きくなります :力がレバー アームに垂直に加えられた場合のみ。
- 高速は高トルクを意味します :トルクは速度ではなく角加速度を引き起こします。
- エンジンのみがトルクを生成します :ピボットから離れた場所に力が加わるとトルクが発生します。
- トルクは常に正です :トルクは方向に応じて正または負になります。
トルクに関するよくある質問
Q:トルクはベクトルですか、それともスカラーですか?
A:トルクは、大きさと方向の両方を持つベクトルです。
Q:トルクを負にすることはできますか?
A:はい。通常、時計回りのトルクは負、反時計回りは正です。
Q:正味トルクとは何ですか?
A:システムに作用するすべてのトルクの合計。正味トルク =0 の場合、角加速度はありません。
Q:トルクと仕事の違いは何ですか?
A:トルクにより回転が発生します。仕事はエネルギー伝達です。トルク × 角度 =回転システムでの作業。
Q:トルクはどのように測定されますか?
A:用途に応じて、トルク レンチ、ダイナモメーター、ひずみゲージ、またはセンサーを使用します。
参考文献と詳細情報
- クレップナー、ダニエル;ロバート・コレンコウ (1973)。 力学入門 。マグロウヒル。 ISBN 9780070350489。
- ナイト、ランドール。ジョーンズ、ブライアン。フィールド、スチュアート (2016)。大学の物理学:戦略的アプローチ (技術最新版第 3 版)。ボストン:ピアソン。 ISBN 9780134143323。
- クマール、シティジ;サヴール、ジェラル。シャヒン、フェラト(2021)。 「産業環境における人間とロボットのコラボレーションに関する調査:意識、インテリジェンス、およびコンプライアンス」。 システム、人間、サイバネティクスに関する IEEE トランザクション:システム 。 51:280–297。土井:10.1109/TSMC.2020.3041231
- R.A. サーウェイ;ジュエット、J.W. ジュニア (2003)。 科学者とエンジニアのための物理学 (第6版)。ブルックス・コール。 ISBN 0-534-40842-7。
- ティプラー、ポール (2004)。 科学者とエンジニアのための物理学:力学、振動と波動、熱力学 (第5版)。 W・H・フリーマン。 ISBN 0-7167-0809-4。