流体力学では、質量流量とそれに伴う密度変化 (質量の保存) のバランスを取る方程式を連続方程式と呼びます。
一次元の流れの連続方程式
経験によれば、質量は無から創造されることも、消滅することもできない。数学的には、この流れの質量保存は、 いわゆる連続方程式で定式化されます。 .
有限体積要素における質量流束
連続方程式を導出するには、まず非常に小さな体積要素 (制御体積) を考慮します。コントロールボリュームの長さはΔxで示され、幅Δyと高さΔzを持ちます。圧縮性流体は、この有限体積要素を通って流れます。流体は側面からボリューム要素に入り、他のサーフェスから出ることができます。
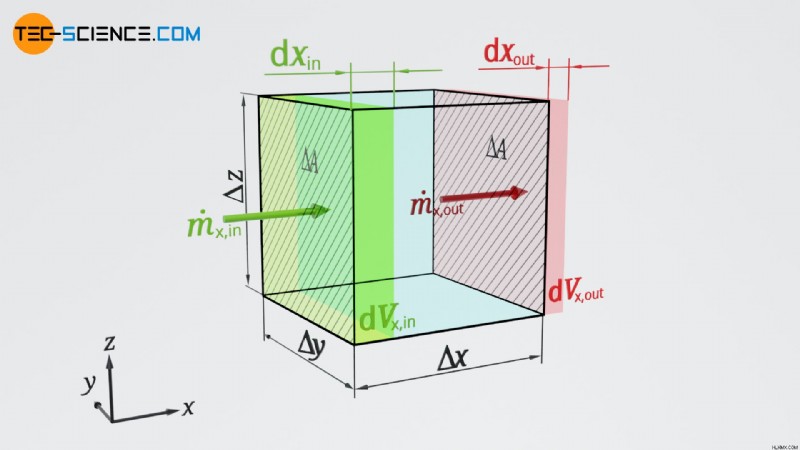 図:質量流束導出のためのコントロール ボリューム
図:質量流束導出のためのコントロール ボリューム 簡単にするために、最初に x 方向の流れだけを考えます。微小時間 dt 以内に、特定の質量 dmx,in が体積要素に流れ込みます。反対側では、特定の質量 dmx,out が同時に体積要素から離れます。
流入または流出する質量は、流れが体積要素に出入りする速度によって決まります。流れが速度 vx,in で体積要素に入ると、時間 dt 内に微小距離 dxx,in=vx,in⋅dt だけ進みます。したがって、次のボリューム dVx,in がコントロール ボリュームに流れ込みます。
\begin{整列}
&\text{d}V_\text{x,in}=\デルタ A \cdot \text{d}x_\text{x,in} =\デルタ A \cdot v_\text{x,in} \cdot \text{d}t\\[5px]
\end{整列}
無限小の距離 dxx,ein を考慮するため、流入体積内では一定の密度が仮定されます。体積要素への入口点における流体の密度が ϱx,in である場合、流入質量 dmx,in は次のように計算されます。
\begin{整列}
&\text{d}m_\text{x,in}=\text{d}V_\text{x,in} \cdot \rho_\text{x,in} =\デルタ A \cdot \rho_\text{x,in} \cdot v_\text{x,in} \cdot \text{d}t \\[5px]
\end{整列}
したがって、単位面積あたりの制御ボリュームに流入する質量は、密度と速度のみに依存します。この面積固有の質量流量 \(\dot m^\text{*}\) は質量流束とも呼ばれます 質量流量と区別しやすくするために、アスタリスク (*) が付いています。
\begin{整列}
&\dot m_\text{x,in}^\text{*} =\frac{\text{d}m_\text{x,in}}{\Delta A \cdot \text{d}t} =\rho_\text{x,in} \cdot v_\text{x,in} \\[5px]
\label{m_ein}
&\underline{\dot m_\text{x,in}^\text{*} =\rho_\text{x,in} \cdot v_\text{x,in}} \\[5px]
&\boxed{\dot m^\text{*} =\rho \cdot v}~~~\text{質量流束} \\[5px]
\end{整列}
流体の流れ場における密度と流速の積は質量流束と呼ばれます。単位時間、単位面積当たりに流れ方向に流れる質量を示します。
圧縮性流体の場合、流れ場の密度は一般に一定ではなく、通常は点ごとに異なります。たとえば、流体が対象のコントロール ボリュームに蓄積する場合、コントロール ボリュームの流出時の密度と流速は、コントロール ボリュームの流入時とは異なります。流出部の質量流束は、流入部の質量流束と同じ方法で計算されます [式 (\ref{m_ein}) を参照]:
\begin{整列}
&\underline{\dot m_\text{x,out}^\text{*} =\rho_\text{x,out} \cdot v_\text{x,out}} \\[5px]
\end{整列}
流出する質量よりもコントロール ボリュームに流入する質量の方が多い場合、内部の質量が増加します (下のアニメーションを参照)。コントロール ボリューム (CV) 内の質量の変化率 \(\dot m_\text{CV}\) は、流入および流出する質量の差から生じます (インデックス x は、コントロール ボリューム内の質量の変化が x 方向の流れによるものであることを示しているだけです。後で、y 方向および z 方向の流れの成分も考慮します)。
\begin{整列}
\label{m}
&\underbrace{~~\dot m_\text{CV}~~}_\text{CV 内の質量の変化} =\underbrace{~~\dot m_\text{x,in}~~}_\text{CV への流入質量} – \underbrace{~~\dot m_\text{x,out}~~}_\text{CV からの流出質量} \\[5px]
&\dot m_\text{CV} ~~=~~ \dot m_\text{x,in}^\text{*} \cdot \Delta A~~ -~~ \dot m_\text{x,out}^\text{*} \cdot \Delta A \\[5px]
&\boxed{\dot m_\text{CV} ~~=~~ \dot m_\text{x,in}^\text{*} \cdot \Delta y\cdot \Delta z~~ -~~ \dot m_\text{x,out}^\text{*} \cdot \Delta y \cdot \Delta z} \\[5px]
\end{整列}
無限小体積要素における質量流束
ここで、質量流束、つまり密度と速度の積が x 座標に沿って変化する、圧縮性流れ内の微小体積要素 (制御体積) を考えてみましょう。したがって、この x 座標に沿って質量流束の勾配:∂(ϱ⋅vx)/∂x を定義できます。距離 dx (微小体積要素の長さ) にわたって、次のような質量流束 \(\text{d} \dot m_\text{x}^\text{*}\) の変化が x 方向に発生します。
\begin{整列}
&\underline{\text{d} \dot m_\text{x}^\text{*} =\frac{\partial (\rho v_\text{x})}{\partial x} \cdot \text{d}x} ~~~~~\text{沿った質量流束の変化 } \text{d}x \\[5px]
\end{整列}
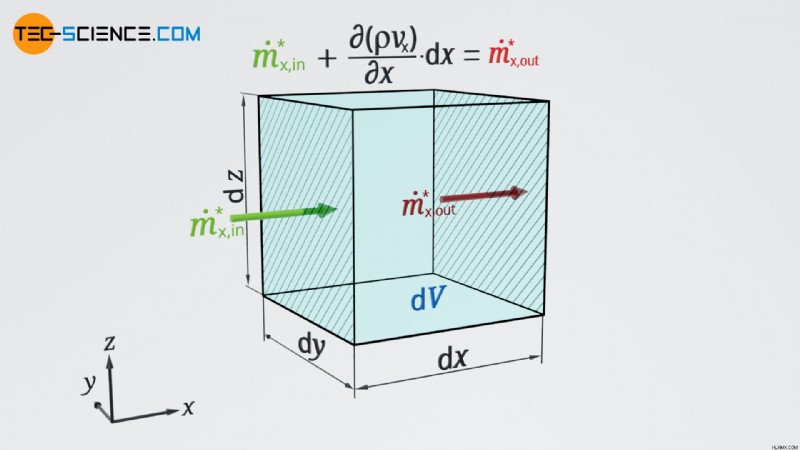 図:コントロールボリュームでの質量流量のバランス
図:コントロールボリュームでの質量流量のバランス したがって、コントロールボリュームの流出時の質量流束は次のように決定されます。
\begin{整列}
&\dot m_\text{x,out}^\text{*} =\dot m_\text{x,in}^\text{*} +\text{d} \dot m_\text{x} \\[5px]
&\underline{\dot m_\text{x,out}^\text{*} =\dot m_\text{x,in}^\text{*} + \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \text{d}x} ~~~~~\text{流出質量流束}\\[5px]
\end{整列}
結果として生じる制御ボリューム内の質量 \(\dot m_\text{CV}\) の時間的変化は、方程式 (\ref{m}) で決定できます。この時点では、無限小寸法 dy と dz が使用されます。
\begin{整列}
\require{キャンセル}
&\dot m_\text{CV} =\dot m_\text{x,in}^\text{*} \cdot \text{d}y \cdot \text{d}z ~-~ \dot m_\text{x,out}^\text{*} \cdot \text{d}y \cdot \text{d}z \\[5px]
&\dot m_\text{CV} =\dot m_\text{x,in}^\text{*}\cdot \text{d}y \cdot \text{d}z ~-~ \left(\dot m_\text{x,in}^\text{*}+ \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \text{d}x \right) \cdot \text{d}y \cdot \text{d}z \\[5px]
&\dot m_\text{CV} =\cancel{\dot m_\text{x,in}^\text{*}\cdot \text{d}y \cdot \text{d}z} ~-~ \cancel{\dot m_\text{x,in}^\text{*} \cdot \text{d}y \cdot \text{d}z}~-~ \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \text{d}x \cdot \text{d}y \cdot \text{d}z \\[5px]
&\dot m_\text{CV} =~- \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \underbrace{\text{d}x \cdot \text{d}y \cdot \text{d}z}_{\text{d}V} \\[5px]
\ラベル{a}
&\underline{\dot m_\text{CV} =~- \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \text{d}V } \\[5px]
\end{整列}
負の符号は、正の勾配の場合、明らかに出ていく質量流量が入ってくる質量流量よりも大きいため、体積要素の質量が時間の経過とともに減少することを示します。ただし、体積要素の質量が一般に時間の経過とともに変化する場合、その密度 ϱ も時間の経過とともに変化します。
\begin{整列}
\ラベル{b}
&\underline{\dot m_\text{CV} =\frac{\partial \rho}{\partial t} \cdot \text{d}V} \\[5px]
\end{整列}
ここでは、時間の経過とともに変化する単一の密度を割り当てることができる、無限小の体積要素を見ていることに注意してください。次のステップでは、体積要素のサイズはいずれにしても重要ではないため、実際に無限に小さいものを選択できることがわかります。さらに、流れの密度は一般に時間の経過とともに変化するだけでなく(例:非定常流れ)、ある点から別の点へと変化することにも注意してください(例:パイプ減速機内)。したがって、密度の時間変化は、時間に関する密度関数の偏微分になります。
方程式 (\ref{a}) の式 (\ref{b}) を使用すると、質量流束の勾配と、その結果として生じる流れの 1 点における密度の時間変化との間に次の関係が最終的に得られます。
\begin{整列}
\require{キャンセル}
&\frac{\partial \rho}{\partial t} \cdot \cancel{\text{d}V} =~- \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \cancel{\text{d}V} \\[5px]
&\boxed{\frac{\partial \rho}{\partial t} =~- \frac{\partial (\rho v_\text{x})}{\partial x}}~~~\text{一次元の流れの連続方程式} \\[5px]
\end{整列}
この方程式は最終的に連続方程式と呼ばれます。 この形式は 1 次元フローに対して有効です。ご覧のとおり、この方程式は質量保存から生じます。連続方程式は、既存の流れ場 (質量流束のベクトルで表される) を利用して、流れの任意の点における密度の時間的変化を決定するのに役立ちます。したがって、圧縮性流体の非定常流れの発生についての記述が可能です。連続方程式によれば、次のステートメントが適用されます。
流れのある点における質量流束の勾配は、この点における密度の時間的変化に対応します。
質量流束はベクトルであり、流速と同じ方向を向いていることに注意してください。これは、質量流束は最終的にはベクトル (速度) とスカラー (密度) の積であるためです。質量流束は基本的に、密度で重み付けされた流速です。流れフィールドを説明するには、ストリームライン、パスライン、ストリークライン、およびタイムラインの記事も参照してください。
3 次元の流れの連続方程式
これまでの考察は、x 方向の 1 次元の流れに限定されていました。ただし、一般に、流れは 3 次元です。つまり、流速には 3 つの方向すべての成分があります。したがって、体積要素を通る x 方向の質量流量を考慮するだけでなく、y 方向および z 方向の流れ成分も考慮する必要があります。質量は、前面と背面を通って体積要素に出入りするだけでなく、側面 (y 方向) と底面と上面 (z 方向) も通って流れます。
アニメーション:ボリューム要素 (コントロール ボリューム) を通る 3 次元の流れy 方向と z 方向については、制御ボリューム内の質量の変化は、式 (\ref{a}) と同じ方法で決定できます。
\begin{整列}
\label{aa}
&\dot m_\text{x} =~- \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \text{d}V \\[5px]
\label{c}
&\dot m_\text{y} =~- \frac{\partial (\rho v_\text{y})}{\partial y} \cdot \text{d}V \\[5px]
\label{d}
&\dot m_\text{z} =~- \frac{\partial (\rho v_\text{z})}{\partial z} \cdot \text{d}V \\[5px]
\end{整列}
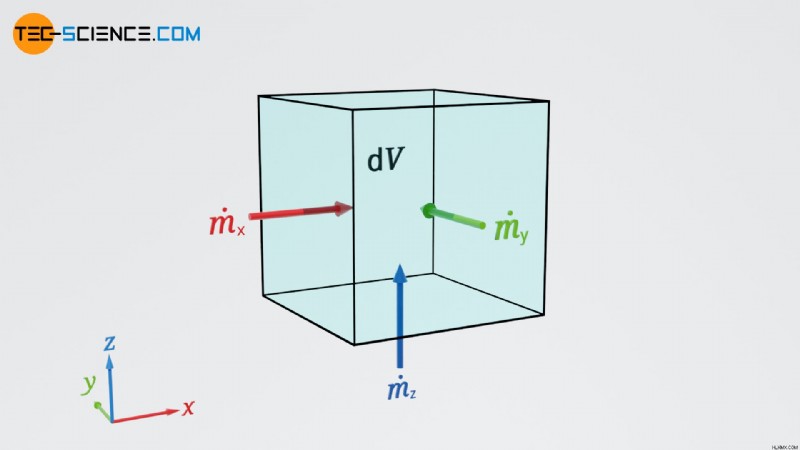 図:体積要素の境界を越える質量流
図:体積要素の境界を越える質量流 この方程式では、速度 vx、vy、vz は流れベクトル v の成分を表します。結果として生じる微小な制御ボリューム内の質量変化は、x 方向の流れだけではなく、y 方向と z 方向の流れの成分にも起因するようになります。 1 次元の流れの方程式 (\ref{b}) と同様に、次の式は 3 次元の流れに適用されます。
\begin{整列}
&\underbrace{\frac{\partial \rho}{\partial t} \cdot \text{d}V}_\text{制御ボリューム内の質量の変化} =\underbrace{\dot m_\text{x}+\dot m_\text{y} +\dot m_\text{z}}_{\text{制御ボリュームの境界を越えて流れる質量}} \\[5px]
\end{整列}
この方程式で使用される方程式 (\ref{aa}) から (\ref{d}) は、最終的に 3 次元の流れの連続方程式を提供します。
\begin{整列}
\require{キャンセル}
&\frac{\partial \rho}{\partial t} \cdot \cancel{\text{d}V}=~- \frac{\partial (\rho v_\text{x})}{\partial x}\cdot \cancel{\text{d}V} – \frac{\partial (\rho v_\text{y})}{\partial y}\cdot \cancel{\text{d}V} – \frac{\partial (\rho v_\text{z})}{\partial z}\cdot \cancel{\text{d}V} \\[5px]
&\boxed{\frac{\partial \rho}{\partial t} =~- \left[\frac{\partial (\rho v_\text{x})}{\partial x}+ \frac{\partial (\rho v_\text{y})}{\partial y}+ \frac{\partial (\rho v_\text{z})}{\partial z}\right]}~~~\text{連続方程式} \\[5px]
\end{整列}
さまざまな方向に関する偏導関数の合計 (質量流束の勾配の合計) は発散 とも呼ばれます。 数学における (div)。発散は数学演算子であり、流れ場の場合に体積要素を通る流れのバランスをとります。発散は、del 演算子 ∇ と質量流束 ϱv のベクトル場のスカラー積として書くこともできます。
\begin{整列}
&\boxed{\frac{\partial \rho}{\partial t} =~- \text{div}\left(\rho \vec v \right) }~~~\text{where}~~~\text{div}\left(\rho \vec v \right) =\vec \nabla \cdot \rho \vec v =\frac{\partial (\rho v_\text{x})}{\partial x}+ \frac{\partial (\rho v_\text{y})}{\partial y}+ \frac{\partial (\rho v_\text{z})}{\partial z} \\[5px]
\end{整列}
非圧縮性流体の場合、密度は変化しないため、時間が経っても一定です。したがって、時間に関する密度の偏導関数はゼロになります (∂ϱ/∂t=0)。さらに、密度も空間的に一定であるため、発散演算子の前に記述することができます。したがって、非圧縮性流体の場合、連続方程式は次の形式になります。
\begin{整列}
&\boxed{\text{div}\left(\vec v \right) =0} ~~~\text{非圧縮性流体の連続方程式} \\[5px]
\end{整列}
発散の解釈
ベクトル フィールドは矢印で視覚化できます。矢印の長さは量の大きさを示し、矢印は方向を示します。ベクトル場は、力線によって視覚化することもできます。力線の密度は場の強さの大きさを示し、力線の接線は方向を示します。同様の方法で、流体の流れ場は流線 (「力線」) によって視覚化できます。流線の密度は流速の尺度であり、流線の接線は流れの方向を示します。
以下の図は、2 次元の流れ場を模式的に示しています。シンクに水を注ぎ、同時に排水口を開けたままにすることを想像してみてください。結果として得られる速度フィールドは、簡略化された方法で、示されている流れフィールドに対応します。
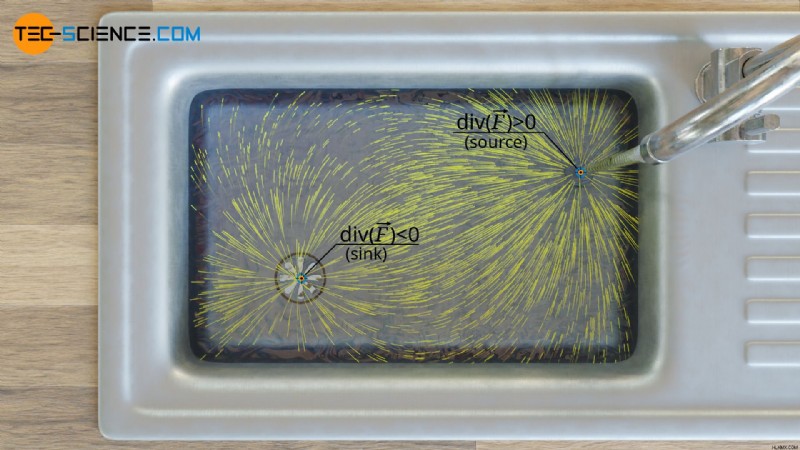 図:ソースの強度の尺度としてのベクトル場の発散
図:ソースの強度の尺度としてのベクトル場の発散 水がシンクに合流する地点に、 水源があります。 。この時点で水が作成されます。 いわば、流れ面内でのことです (ここでは、3 次元のケースではなく 2 次元のケースを見ていることに注意してください。明らかに、無から水は生成されません)。排水溝のある地点では、二次元的には水が消えます。この時点で、 流れ面内の水は消滅します。 、いわば。
このベクトル場に発散演算子を適用すると、 水が作成される時点で正の値が得られます。 。水が消滅した時点で 、負の値を取得します。発散演算子をベクトル場に適用すると、ソース を視覚化できます。 そしてシンク ベクトルフィールドを鮮やかに表現します。力線または流れ線は、正の発散点 (ソース) で始まり、負の発散点 (シンク) で終わります。力線または流線がソースまたはシンクで強く発散するという事実が、最終的にこの演算子の名前の理由です。
発散演算子はベクトル場をスカラー場に変換し、スカラー量は場のソースの強度の尺度になります。正の値はフィールド ラインのソースを示し、負の値はフィールド ラインのシンクを示します。
上に示した流れ場の代わりに、2 つの電荷を想像することもできます。結果として生じる磁力線は非常に似たものになります。実際、ソースの強さの尺度(電荷の尺度)としての発散は、この分野でも重要な役割を果たします。したがって、発散演算子は多くのベクトル場にとって非常に重要です。
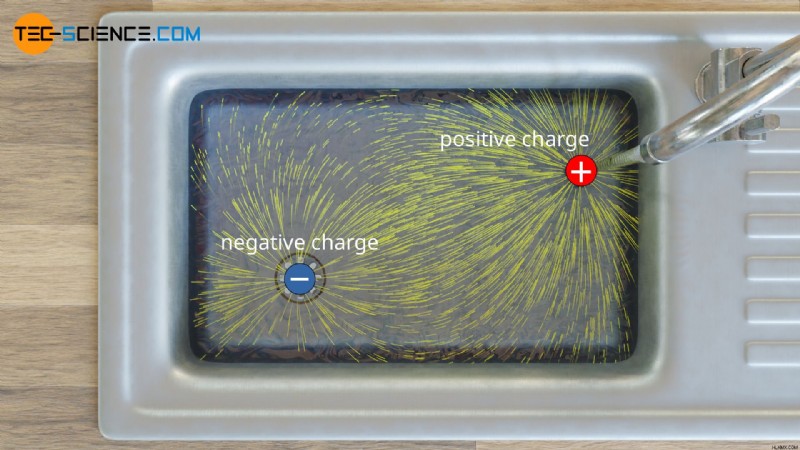 図:電場の磁力線イメージ
図:電場の磁力線イメージ しかし、ソースやシンクがなくソースフリーなベクトル場もあります。 。これらには、たとえば、磁力線の始まりも終わりもなく、常に閉じている磁場が含まれます。非圧縮性の流れであっても、質量は生成または消滅できないという事実により、明らかにソースフリーです (注:上記の 2D 流れ場の例は、説明のための例としてのみ機能します)。