遠心ポンプは、遠心力によって圧力上昇が生じる幅広い用途に使用できます。
ラジアル、アキシャル、斜流ポンプ
遠心ポンプは、羽根車の回転によって発生する遠心力を利用して液体を圧送するターボ機械です。インペラの軸方向に沿って、ポンプで送られる液体は吸込側のポンプの吸込ポートに入ります。ポンプ内で回転するインペラは、遠心力の影響で液体を加速します。
 図:渦巻ポンプ
図:渦巻ポンプ 速度が増加すると、流体内の動圧が上昇します。インペラから離れると、溜まった液体により吐出口で液体が再び減速します。したがって、液体の動圧は静圧に変換されます (動圧と静圧の関係についての詳細は、記事「ベンチュリ効果」を参照してください)。その結果、吐出口の静圧が非常に上昇します。この高圧により、液体は特定の測地水頭を超えることができます。
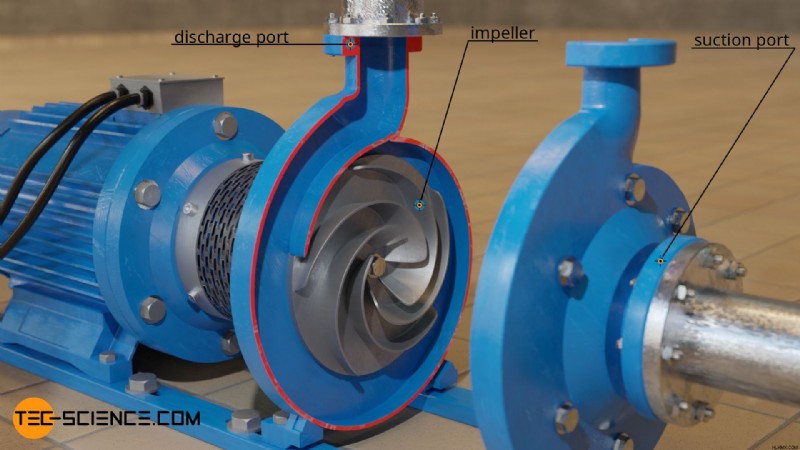 図:ラジアル遠心ポンプの設計 (簡略化) アニメーション:遠心ポンプの動作原理
図:ラジアル遠心ポンプの設計 (簡略化) アニメーション:遠心ポンプの動作原理 ポンプまたはインペラの設計に応じて、液体はインペラから半径方向または軸方向に流出します。放射状の流れを発生させるポンプは放射状流ポンプとも呼ばれます。 。ラジアル ポンプのインペラは、カバー プレートを備えたクローズド インペラとして、またはオープン インペラとして設計されています (図では後者を示しています)。
 図:遠心ポンプの羽根車
図:遠心ポンプの羽根車 液体がインペラから軸方向に流出する場合、 この設計は軸流ポンプとも呼ばれます。 。この場合、インペラは船のプロペラのように機能しますが、この場合プロペラは固定されているため、パイプ内に流れが生成されます。したがって、 軸流ポンプはプロペラポンプとも呼ばれます。 。これらは循環ポンプとしてよく使用されます。 化学プラントで。液体がインペラから正確に軸方向または半径方向に排出されない遠心ポンプもあります。これらのポンプは斜流ポンプと呼ばれます。 または斜流ポンプ .
 図:軸流ポンプの動作原理
図:軸流ポンプの動作原理 遠心ポンプは、遠心力を利用して液体を送り出すターボマシンです。インペラに関連して生成される流れに応じて、それらはラジアルフローポンプ、アキシャルフローポンプ、または斜流ポンプと呼ばれます。
アニメーション:軸流ポンプの動作原理軸流ポンプとは対照的に、ラジアルフローポンプはより高い圧力ヘッドを提供できますが、通常は比較的低い流量を生成します。高流量を達成するには、複数のラジアルフローポンプを並列に接続する必要がある場合があります。軸流ポンプは高い体積流量を提供しますが、圧力揚程は比較的低い (約 15 m) だけです。軸流ポンプで大きな圧力ヘッドを実現するには、複数のポンプを直列に接続する必要がある場合があります。混合流ポンプは、両方のポンプ タイプの長所と短所の間の妥協点を提供します。
ラジアルフローポンプは低流量で高圧ヘッドを提供し、アキシャルフローポンプは低圧力ヘッドで高流量を提供します。斜流ポンプは、両方の設計の妥協点を提供します。
1 枚から最大 3 枚までの羽根を備えたラジアル インペラは、重度に汚染された液体または固体を含む液体のポンプ輸送に使用されます。羽根の数が少ないと流れの断面積が大きくなり、インペラを通る流れが改善されます。このようなインペラはチャネルインペラとも呼ばれます。 。プロペラ ポンプの場合、固体を含む液体を圧送する場合、インペラのスクリュー設計が使用されます。
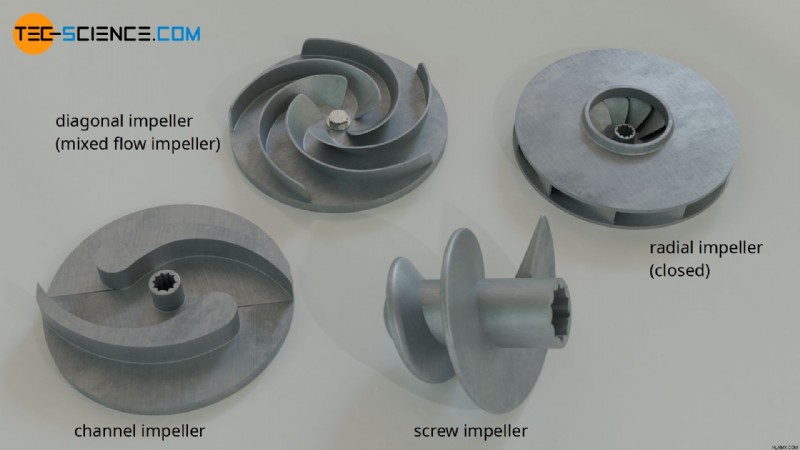 図:渦巻ポンプ用羽根車の種類
図:渦巻ポンプ用羽根車の種類 キャビテーション
ポンプは吸入口に発生する負圧により流体を吸い込みます。より正確に言うと、吸引パイプの外側の周囲圧力が高くなると、流体が負圧の方向にポンプ内に押し込まれます (ストローで飲む原理)。周囲圧力は 1 bar であり、ポンプは最大でも真空を作成できるため、流体をポンプに押し込むことができる圧力は最大 1 bar に制限されます。これにより、限られた測地吸引ヘッドしか達成できなくなります。水を汲み上げる場合、完全な真空が形成されたときの最大吸引揚力は理論的には 10 メートルです。
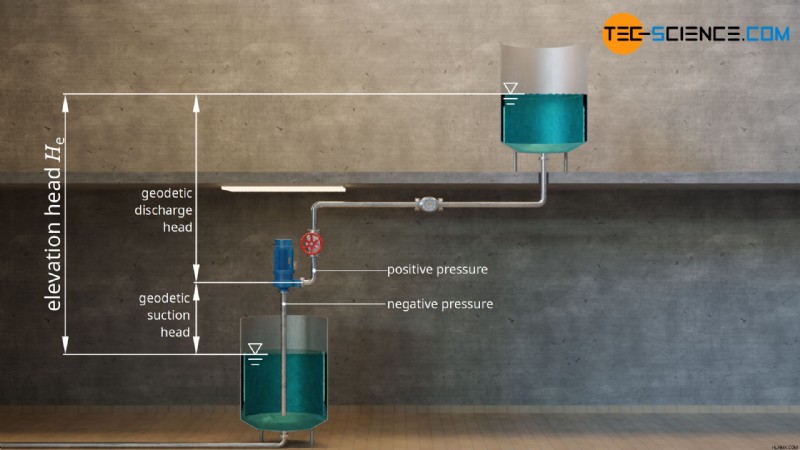 図:昇降ヘッド(測地吸引ヘッドと吐出ヘッド)
図:昇降ヘッド(測地吸引ヘッドと吐出ヘッド) ただし、遠心ポンプの吸込揚程は周囲圧力だけでなくキャビテーションによっても制限されます。 。キャビテーションは、液体内の静圧が蒸気圧を下回るときに発生する蒸気泡です。温度 20 °C における水の蒸気圧は 23 mbar です。水中の静圧がこの値を下回ると、この低温でも水は局所的に蒸発し始め、小さな気泡が形成されます (水が沸騰しているときに上昇する蒸気泡に似ています)。
その後、ポンプ内の圧力が再び上昇すると、気泡が不安定になり、爆発します。これはガスで満たされた気泡であるため、粒子密度は比較的低くなります。したがって、バブルはほとんど抵抗なく崩壊します。周囲の液体は崩壊する泡の中で非常に強く加速されるため、結果として生じるマイクロジェットは数千気圧の局所的な圧力を生成します。このようなマイクロジェットがインペラの羽根に当たると、時間の経過とともに損傷が発生します。キャビテーションの発生は、ポンプの大きな音や振動によって気づくことがよくあります。
キャビテーションとは、蒸気泡の形成とその後の爆縮であり、それによって生じるマイクロジェットがコンポーネントの表面を破壊します。
静圧が比較的低い領域では、特に蒸気泡が発生しやすくなります。これは 2 つの理由からポンプ入口に当てはまります。一方で、液体をポンプ内に送り込むことができるように、ポンプはとにかく負圧でなければなりません。また、ベンチュリ効果により、流速が増加すると静圧が低下します。特にインペラへの入口では、入口断面積が小さくなるため流速が特に高くなり、静圧が最も低くなります。そこで圧力が蒸気圧を下回ると、気泡が形成され、ポンプ内の圧力上昇により最終的には破裂します。
NPSH 値
流体を送出するためにポンプが強い負圧を生成する必要がある場合、キャビテーションのリスクが特に高くなるのは明らかです。配管システムの観点から見ると、これは、大きな測地吸引ヘッドと吸引パイプの大きな水頭損失 (摩擦によって引き起こされる) の場合に当てはまります。ポンプの観点から見ると、高流量ではキャビテーションのリスクが高くなります。これは、高い流速を意味し、静圧の大幅な低下につながるためです。
配管システムの NPSH 値 (NPSHA)
したがって、遠心ポンプをキャビテーションのない状態で動作させるには、ポンプの入口 (基準レベルとしての吸引ポートの中心) での全圧力が、ポンプで送り出される液体の蒸気圧を下回らないようにする必要があります。入口ピンの全圧 tot と液体の蒸気圧 pvap の間に存在する差 Δp は、次の方程式で決定されます。ここで、全圧は、静圧 pin と動圧 ϱ/2⋅vin2 の合計として記述できます (vin は、インペラへの入口における平均流速を示します)。
\begin{整列}
&\Delta p =p_\text{in,tot} – p_\text{vap} \\[5px]
\label{dp}
&\Delta p =\left(p_\text{in}+\frac{\rho}{2}v_\text{in}^2 \right) – p_\text{vap} \\[5px]
\end{整列}
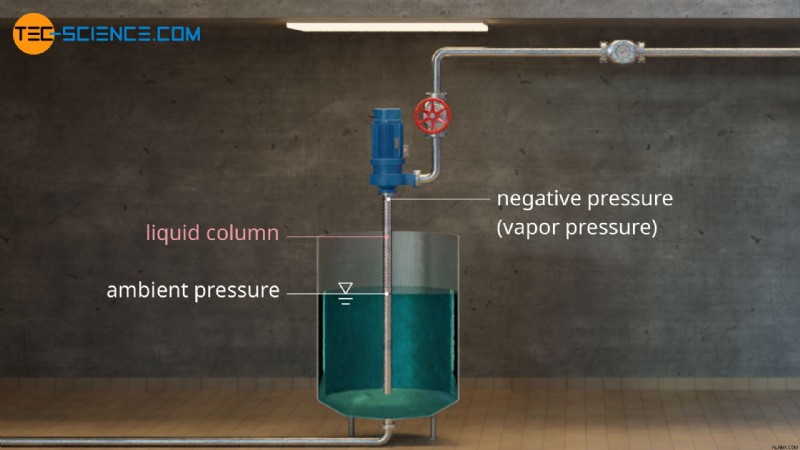 図:正味吸引ヘッド (NPSH 値)
図:正味吸引ヘッド (NPSH 値) この方程式の意味は何でしょうか?損失を考慮しない場合、入口での全圧力 (丸括弧内の用語) は、エネルギー保存により媒体が吸引パイプの開口端に押し込まれる全圧力に相当します。この圧力は、吸引パイプの他端 (インペラへの入口) で、利用可能な最小圧力としての液体の蒸気圧によって相殺されます。したがって、圧力差 Δp は正味の吸入圧力として解釈できます。 液体を吸い込むことができます。 蒸気圧を下回らずに最大まで上昇します。
この正味の吸引圧力は、この吸引圧力で上昇する可能性のある液柱の同等の高さ (ヘッド) に変換することもできます。これをNと呼びます。 et P 正S アクション H ええ (NPSH) )。配管システムの利用可能な NPSH 値を決定するには (利用可能なインデックス A) )、方程式 (\ref{dp}) は項 ϱ⋅g で除算されます。
\begin{整列}
&\underbrace{\frac{\Delta p}{\rho g}}_{\text{NPSH}_\text{A}} =\left(\frac{p_\text{in}}{\rho g}+\frac{v_\text{in}^2}{2g}\right) – \frac{p_\text{vap}}{\rho g} \\[5px]
\ラベル{a}
&\underline{\text{NPSH}_\text{A} =\left(\frac{p_\text{in}}{\rho g}+\frac{v_\text{in}^2}{2g} \right) – \frac{p_\text{vap}}{\rho g}} \\[5px]
\end{整列}
拡張ベルヌーイ方程式を使用すると、液体が吸い込まれるタンク (0) での液体の状態と、インペラへの入口 (in) での状態との間に関係を確立できます。吸入管内の圧力損失 Δploss タンク内の液面の降下速度は通常低いため (v0 ≈ 0)、運動エネルギーは無視されます。
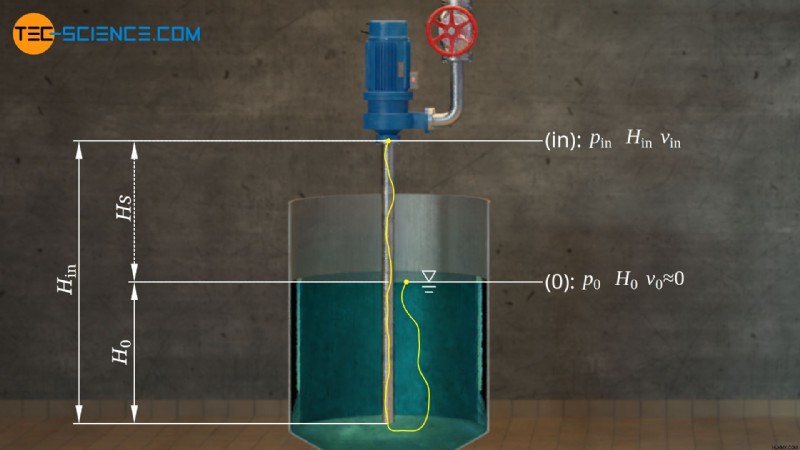 図:NPSH 値の導出
図:NPSH 値の導出
\begin{整列}
\require{キャンセル}
&p_0 + \frac{1}{2} \rho \cancel{v_0^2} +\rho g H_0=p_\text{in} + \frac{1}{2} \rho v_\text{in}^2 + \rho g H_\text{in} + \Delta p_\text{loss}\\[5px]
&p_0 + \rho g H_0=p_\text{in} + \frac{1}{2} \rho v_\text{in}^2 + \rho g H_\text{in} + \Delta p_\text{loss} \\[5px]
&\frac{p_0}{\rho g} + H_0=\frac{p_\text{in}}{\rho g} + \frac{v_\text{in}^2}{2g} + H_\text{in} + \underbrace{\frac{\Delta p_\text{loss}}{\rho g}}_{\text{損失損失 }H_\text{損失}} \\[5px]
&\frac{p_\text{in}}{\rho g} + \frac{v_\text{in}^2}{2g} =\frac{p_0}{\rho g} – \underbrace{(H_\text{in}~ -~ H_0)}_{\text{測地吸引ヘッド}H_\text{s}} – H_\text{loss} \\[5px]
\label{pe}
&\underline{\frac{p_\text{in}}{\rho g} + \frac{v_\text{in}^2}{2g} =\frac{p_0}{\rho g} – H_\text{s} – H_\text{loss}} \\[5px]
\end{整列}
方程式 (\ref{a}) の丸括弧内の項は、方程式 (\ref{pe}) に置き換えることができます。
\begin{整列}
&\text{NPSH}_\text{A} =\left(\frac{p_0}{\rho g} – H_\text{s} – H_\text{loss} \right) – \frac{p_\text{vap}}{\rho g} \\[5px]
&\boxed{\text{NPSH}_\text{A} =\frac{p_0-p_\text{vap}}{\rho g} – H_\text{s} – H_\text{loss}} \\[5px]
\end{整列}
この式において、Hloss は吸込管内の摩擦と流量損失による水頭損失を表します。測地吸引ヘッド Hs は、タンク内の液面とインペラへの入口の間の高さの差に対応します。いわゆる吸引手術の場合。 つまり、タンクがポンプ入口よりも低い場合、吸引ヘッドには正の値を使用する必要があります。タンクがポンプ入口より高い場合、 これを加圧運転といいます。 「吸引ヘッド」の値には負の符号が付きます。
ポンプの NPSHR 値 (NPSHR)
NPSHA 値は、配管システムの特性により利用可能な圧力ヘッドに対応します。キャビテーションのない動作を実現するには、ポンプの提供される圧力ヘッドがシステムの NPSHA 値を超えてはなりません。したがって、ポンプがシステムの観点から利用可能な値よりも低い NPSH 値を生成することが絶対に必要です。したがって、ポンプの NPSH 値は NPSHR 値 (インデックスR) と呼ばれます。 R の場合 必須)。
遠心ポンプの NPSHR 値は、メーカーによってデータシートに指定されています。 NPSHR 値は、インペラの回転速度と供給される流量に大きく依存します。安全上の理由から、システムの NPSHA 値はポンプの NPSHR 値より約 0.5 m 高くする必要があります。
\begin{整列}
&\boxed{\text{NPSH}_\text{A} \geq \text{NPSH}_\text{R} + 0,5 \text{ m}} ~~~\text{キャビテーションフリー動作} \\[5px]
\end{整列}
キャビテーション防止対策
遠心ポンプの運転中にキャビテーションが発生した場合には、適切な対策を講じる必要があります。圧力が過度に低下しないようにするには、流速を下げることが重要です。
ポンプの観点から見ると、これは、たとえばインペラの回転速度を下げることによって実現できます。ただし、この対策では流量が減少します。このような流量の減少が望ましくない場合は、低速でも同じ流量を供給できる、より大きなポンプを使用する必要があります。
圧力の過度の低下は、 いわゆるインデューサを使用することによっても防ぐことができます。 。インデューサは、実際のポンプ インペラの上流に接続され、同じシャフトに取り付けられるアキシャル インペラです。インデューサーは、流体が実際のインペラに入る前 (または複数のインペラの最初のステージの前) に流体の静圧を増加させるため、圧力が蒸気圧を下回るリスク (ポンプの NPSHR 値の低下) を軽減します。
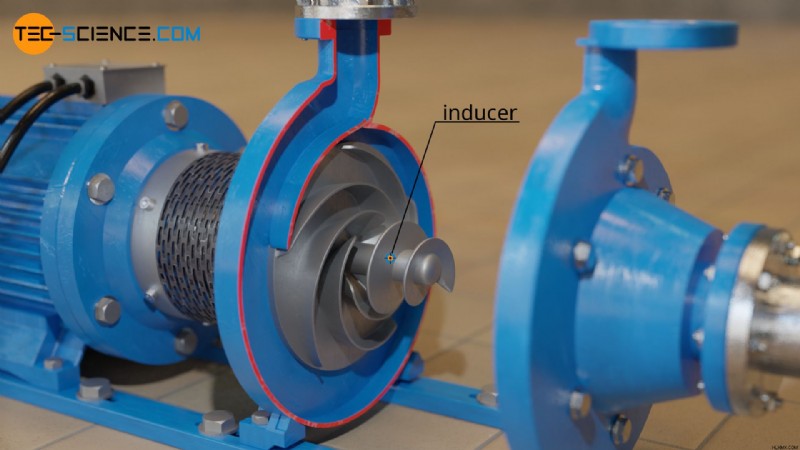 図:渦巻ポンプのインデューサー
図:渦巻ポンプのインデューサー インデューサーを備えた遠心ポンプは、全負荷時にインデューサー内でキャビテーションが発生するため、部分負荷範囲で運転されます。したがって、インデューサ付きポンプは、インデューサなしのポンプに比べて負荷範囲全体をカバーできません。追加のインペラにより、エネルギー変換効率も低くなります。
キャビテーションを低減・回避するための対策は、配管システムの観点から行うこともできます。吸込みパイプの断面積が増加すると(流量が一定の場合)、流速も低下します。これに関連して、吸引パイプの詰まりもチェックする必要があります。
キャビテーションを回避するもう 1 つの方法は、測地吸引ヘッドをできるだけ低く保つことです。この目的のためには、吸引タンクをより高い位置に設置するか、ポンプをより低い位置に設置する必要があります。吸引運転から加圧運転への切り替えも検討する必要があるかもしれません。
遠心ポンプの起動および停止手順
ポンプに損傷を与える可能性があるため、遠心ポンプのスイッチをオン/オフするだけではいけません。したがって、一定の手順に従う必要があります。まず第一に、ポンプ内に流体が入っていないときはポンプのスイッチを入れてはならず、動作中にポンプが空運転してはいけません。一方で、遠心ポンプは通常、空運転時には吸引効果を生み出すことができないため、流体を圧送することができません ( 例外:自吸式ポンプ) サイドチャネルポンプなど)。一方、流れる液体はポンプを冷却する役割も果たします。この冷却が行われない場合、ポンプは急速に過熱します。さらに、液体圧力はポンプ内の回転コンポーネントに一定のセンタリング効果を及ぼし、隣接するハウジングとの直接接触を防ぎます。上記の理由により、 遠心ポンプには多くの場合空運転保護機能が備わっています。 液体がない場合は、ポンプのスイッチがすぐにオフになります。
したがって、ポンプを始動する前に、ポンプを液体で満たす必要があります (呼び水)。 )。ポンプに呼び水をするときは、吸引パイプを通してポンプを再度空にしてはなりません。このため逆止弁が必要です。 またはフットバルブ 通常、吸込管には逆流防止弁(逆止弁)が取り付けられており、自動的に逆流を防ぎます。シンプルなブロックバルブ またはゲートバルブ インストールすることもできますが、最初に手動で閉じる必要があります。
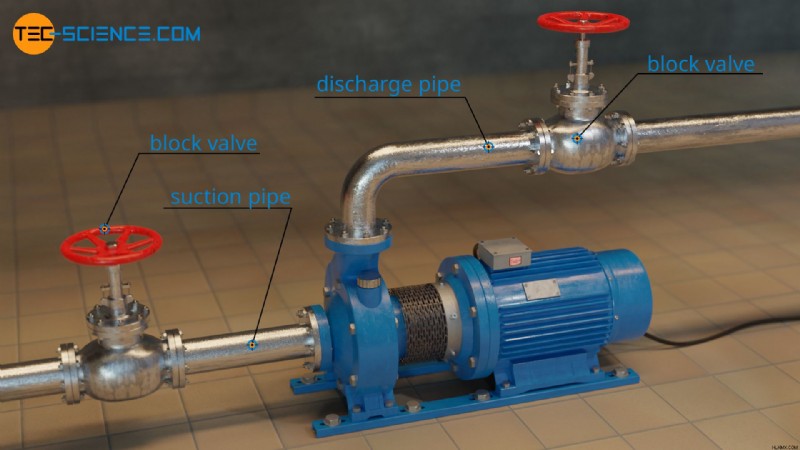 図:渦巻ポンプの起動・停止手順
図:渦巻ポンプの起動・停止手順 充填直後にバルブを開いてポンプのスイッチを入れると、ポンプはすぐに高流量を供給します。電気モーターのシャフトを回転させ、同時に高流量を供給するには、モーターの非常に高い電力が必要になります。過熱の原因となる可能性があります。これを防ぐには、ポンプの起動時に流量を絞る必要があります。
ただし、吸込管に狭窄があると流速が増加し、キャビテーションが発生する危険性があるため、吸込管のブロックバルブによって流量は絞られません。このため、排出パイプには別のブロック バルブがあり、ポンプのスイッチが入ったときは最初は閉じられていますが、流量が最大までゆっくりと増加するように徐々にだけ開かれます。
要約すると、 遠心ポンプは始動します。 次の手順で:
<オル>ポンプを停止する場合も所定の手順に従う必要があります。まず、吐出管のバルブを再びゆっくりと閉じます。あまりにも早く閉じることは避けるべきです。そうしないと、バルブの後ろの液体がその慣性によって流れ続けようとするため、非常に高い負圧が生成されます。その後、負圧によって液体が再び引き戻され、バルブに全力で当たります。これにより、バルブとパイプの両方が破損する可能性があります。
排出パイプのバルブを閉じた後、ポンプのスイッチをオフにすることができます。ポンプが空になるのを防ぐために、吸引パイプのブロックバルブを再度閉じる必要があります。逆止弁を使用すると、これは自動的に行われます。
要約すると、 遠心ポンプは停止します。 次の手順で:
<オル>