ベルヌーイ方程式は、非粘性および非圧縮性流体の静圧、動圧、および静水圧の関係を記述します。
静圧、動圧、静水圧
静止流体に作用する圧力により、界面に力がかかります。この力は、たとえばシリンダー内のピストンに力が作用するときに機械的仕事を行うことができます。ベンチュリ効果の記事では、圧力は体積固有のエネルギーとして解釈できることについてすでに詳しく説明しました。 。圧力は、単位体積当たりの位置エネルギーが流体内にどれだけ存在し、機械的仕事に変換できるかを示します。
\begin{整列}
\label{p}
&\boxed{p=\frac{\Delta W}{\Delta V}} \\[5px]
\end{整列}
 図:体積固有の位置エネルギーとしての圧力
図:体積固有の位置エネルギーとしての圧力 静止している流体は、静圧、 つまりランダムな微小な動きによって生じる圧力に基づいてのみ仕事を実行できます。 分子が界面に衝突したときの圧力 (ガス中の圧力の記事を参照)。ただし、流体が流れる場合(秩序だった巨視的なバルク運動) ) の場合、流体はその動きに伴う運動エネルギーによって仕事を行うこともできます。この運動エネルギーが流体の体積に関連している場合、式 (\ref{p}) に従って運動エネルギーを圧力に割り当てることもできます。 静圧とは対照的に 、 この場合は動的な圧力について話します。 。簡単に言うと、次のようになります。
静圧は分子のランダムな微視的運動と関係しており、動圧は流れる流体の秩序だった巨視的バルク運動と関係しています。
基準レベルに応じて、流体には重力位置エネルギーもあり、これも仕事に変換できます。このエネルギーは、たとえば水力発電所で使用されます。方程式 (\ref{p}) によれば、単位体積あたりに含まれる位置エネルギーは、特定の圧力に対応します。この圧力は静水圧と呼ばれます。 !
外部源から流れにエネルギーが供給されない場合、エネルギー保存の理由から、静エネルギー (「圧力エネルギー」)、運動エネルギー、および重力位置エネルギーの合計は一定のままでなければなりません。水平方向の流れまたは低密度の流体 (例:気体) の流れの場合、重力位置エネルギーの変化は存在しないか、無視できます。このような場合、運動エネルギーの増加は必然的に静エネルギーの減少を意味します。
このようなケースは、断面積が減少する水平パイプで発生します。質量保存のため、パイプ内に質量が蓄積したり消滅したりすることはありません。したがって、質量流量はパイプに沿ったどの点でも同じになります。したがって、断面が小さい場合、同じ質量が単位時間あたりに流れることができるように、流速を大きくする必要があります。
アニメーション:断面積を小さくして流速を高めるしたがって、断面積の減少は必然的に流速の増加を意味します。結果として生じる運動エネルギーの増加は、エネルギーが供給されない限り(ポンプなどによって)静的エネルギーからのみ得られます。したがって、静圧が減少して動圧が優先されます。ベンチュリ効果の記事では、流速の増加に伴って圧力が低下するこの現象について、すでに詳しく説明されています。
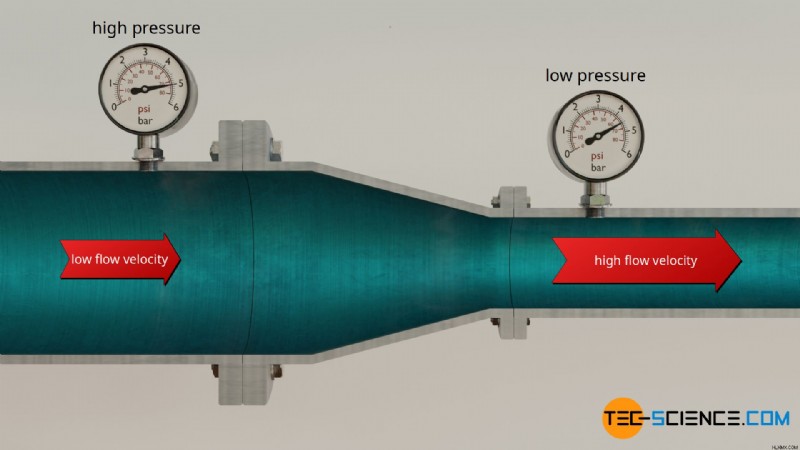 図:流速の増加とそれに関連する圧力の低下
図:流速の増加とそれに関連する圧力の低下 前に述べたように、流体が特定の高さを超えるときは、重力の位置エネルギーを考慮する必要があります。高さ、流速、静圧の関係は次のように導出されます。
関係を導出するために、摩擦のないパイプ内の非圧縮性の非粘性流れを考慮します。パイプはさまざまな断面を持ち、特定の高さを超えます。
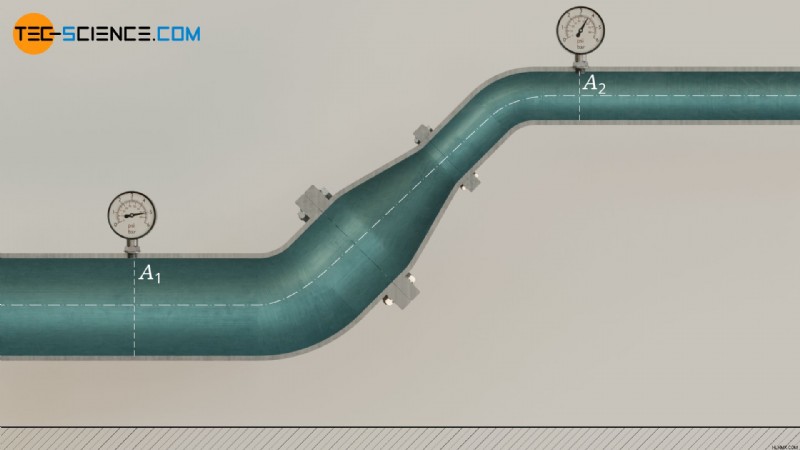 図:パイプ内の流れを使用したベルヌーイ方程式の導出
図:パイプ内の流れを使用したベルヌーイ方程式の導出 圧力エネルギー (「押し込まれる」エネルギーと「押し出される」エネルギー)
まず、静圧 p1 が作用する点 1 のパイプセクションの下部を見てみましょう。特定の時間 Δt 以内に、この圧力によりパイプ断面 A1 に特定の流体質量 Δm が押し込まれます。考慮されている流体要素が押し込まれる距離は、Δs1 で示されます。静圧により流体要素が点 1 でパイプ内を押し込まれる圧力エネルギー W1 (「押し込み」エネルギー) は、押し込まれた流体の体積 ΔV によって決まります。
\begin{整列}
&W_1 =F_1 \cdot \Delta s_1=p_1 \underbrace{A_1 \cdot \Delta s_1}_{\Delta V} \\[5px]
&\underline{W_1 =p_1 \Delta V} ~~~~~\text{「押し込まれた」エネルギー}\\[5px]
\end{整列}
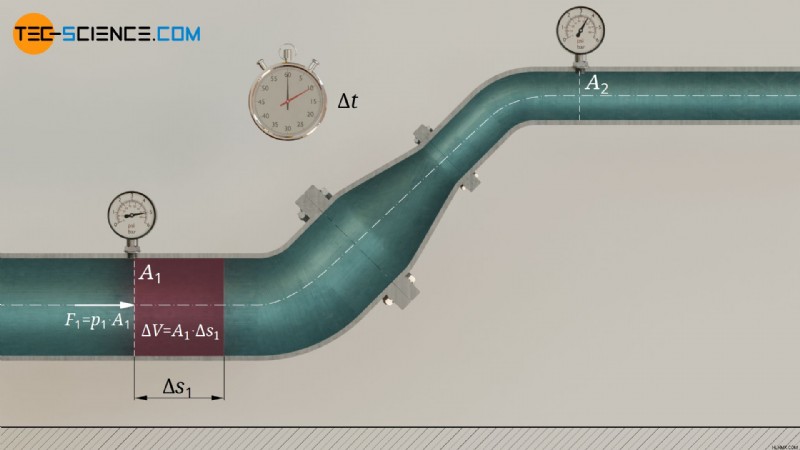 図:静圧により流体ボリュームがパイプセクションに押し込まれるエネルギー
図:静圧により流体ボリュームがパイプセクションに押し込まれるエネルギー 次に、パイプの上部のポイント 2 に注目します。ここでは、前のセクションで説明した関係により、静圧 p2 が低くなります。ただし、考慮した時間 Δt 内で、同じ流体質量が縮小断面 A2 を介して押し出される必要があります (質量の保存)。非圧縮性流体が想定されているため、A2 には A1 と同じ流体体積 ΔV が流れます。
ただし、断面 A2 が小さくなると、距離 Δs2 が大きくなり、流速が速くなります。そこに作用する静圧 p2 により、流体要素は次の圧力エネルギー W2 (「押し出される」エネルギー) で点 2 でパイプ内を押し出されます。
\begin{整列}
&W_2 =F_2 \cdot \Delta s_2=p_2 \underbrace{A_2 \cdot \Delta s_2}_{\Delta V} \\[5px]
&\underline{W_2 =p_2 \Delta V} ~~~~~\text{「押し出された」エネルギー}\\[5px]
\end{整列}
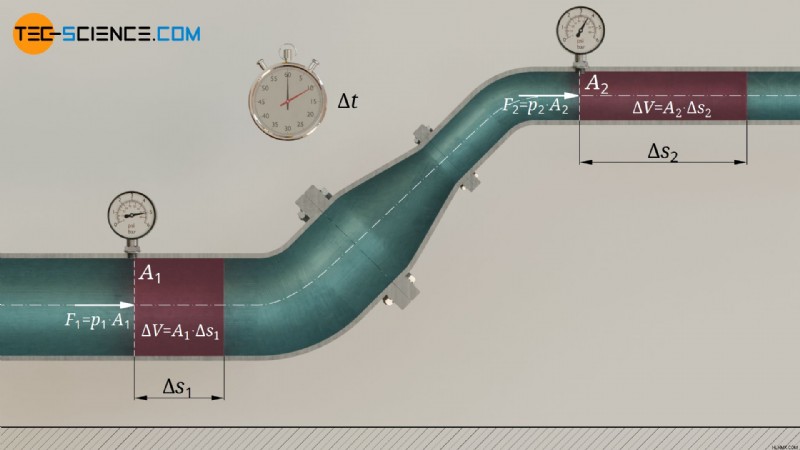 図:静圧により流体ボリュームがパイプセクションから押し出されるエネルギー
図:静圧により流体ボリュームがパイプセクションから押し出されるエネルギー 流体を加速して持ち上げるために必要な仕事
実際には、流体要素が点 1 でパイプ部分に押し込まれるときの圧力エネルギー W1 が、点 2 で押し出されるときの圧力エネルギー W2 よりも大きいことがわかります。この理由は、「押し込まれた」エネルギーの一部を、流体要素を加速し (運動エネルギーの供給)、重力に逆らって流体を持ち上げる (重力位置エネルギーの供給) ために使用する必要があるためです。 「押し込み」エネルギーから、流体を加速して持ち上げるのに必要な仕事を差し引いたものが、残りの「押し出し」エネルギーとなります。つまり、圧力エネルギーの差は、加速仕事 ΔWa と持ち上げ仕事 ΔWh の和になります。
\begin{整列}
\ラベル{a}
&\boxed{W_1 – W_2 =\Delta W_\text{a} + \Delta W_\text{h}} \\[5px]
\end{整列}
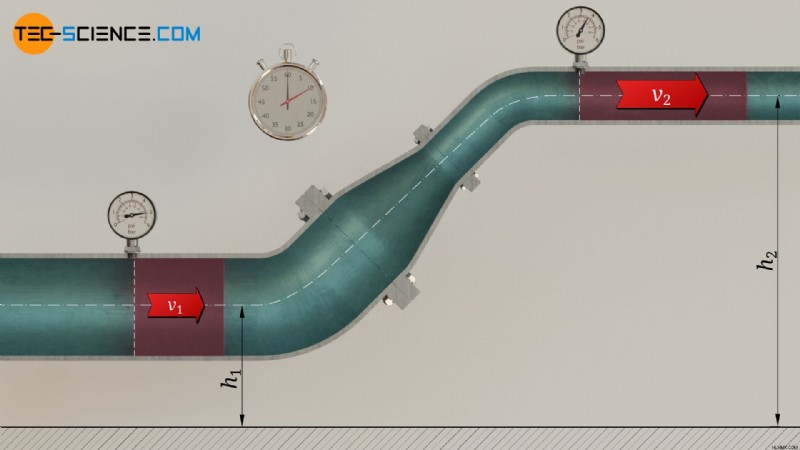 図:流体の加速と揚力を考慮した場合
図:流体の加速と揚力を考慮した場合 流体要素を v1 から v2 に加速するのに必要な仕事は、点 2 と点 1 での運動エネルギーの差によって決まります (注:Δm=ϱ⋅ΔV):
\begin{整列}
&\Delta W_\text{a} =W_\text{kin,2} -W_\text{kin,1} \\[5px]
&\underline{\Delta W_\text{a} =\frac{1}{2} \cdot \rho \Delta V \cdot v_2^2 ~- \frac{1}{2} \cdot \rho \Delta V \cdot v_1^2} \\[5px]
\end{整列}
流体要素を高さ h1 から高さ h2 まで持ち上げるのに必要な仕事は、点 2 と点 1 における重力位置エネルギーの差によって決まります。
\begin{整列}
&\Delta W_\text{h} =W_\text{h,2} – W_\text{h,1}\\[5px]
&\underline{\Delta W_\text{h} =\rho \Delta V \cdot g \cdot h_2 – \rho \Delta V \cdot g \cdot h_1}\\[5px]
\end{整列}
ベルヌーイ方程式
前の式が方程式 (\ref{a}) で使用される場合、考慮中の 2 点における圧力エネルギー、運動エネルギー、および重力位置エネルギーの間に次の関係が推定できます。
\begin{整列}
\ラベル{1}
&\underbrace{p_1 {\Delta V} – p_2 {\Delta V}}_{\text{圧力エネルギー}} =\underbrace{\frac{1}{2} \rho {\Delta V} v_2^2 – \frac{1}{2} \rho {\Delta V} v_1^2}_{\text{運動エネルギー}} + \underbrace{\rho {\Delta V} g h_2 – \rho {\Delta V}g h_1}_{\text{重力位置エネルギー}} \\[5px]
\end{整列}
すべてのエネルギー項には流体の体積が含まれます。したがって、この方程式は流体体積で割ることができるため、流体体積とは独立しています。
\begin{整列}
\ラベル{2}
&p_1 – p_2 =\frac{1}{2} \rho v_2^2 – \frac{1}{2} \rho v_1^2 + \rho g h_2 – \rho g h_1 \\[5px]
\end{整列}
この方程式を整理すると、最終的にフロー内の 2 つの状態 1 と 2 の間に次の関係が得られます。
\begin{整列}
&\boxed{p_1 + \frac{1}{2} \rho v_1^2 +\rho g h_1=p_2 + \frac{1}{2} \rho v_2^2 + \rho g h_2} ~~~\text{ベルヌーイ方程式} \\[5px]
&\テキスト{または}\\[5px]
&\boxed{p + \frac{1}{2} \rho ~v^2 +\rho g h=\text{constant}}=p_\text{tot} \\[5px]
\end{整列}
この方程式はベルヌーイ方程式としても知られています。 。ベルヌーイ方程式にある項はすべて、圧力の次元を持っています。流体の運動エネルギーに関連する用語 ½⋅ϱ⋅v² は流体圧力と呼ばれます。 または単に動的な圧力 。重力位置エネルギーに関連する用語 ϱ⋅g⋅h は、静水圧と呼ばれます。これらの圧力用語とは対照的に、圧力 p は静圧と呼ばれます。 .
加圧タイプ 期間 エネルギー的に結びついている 静圧圧力エネルギー(単位流体体積あたり)動圧¹⋅ϱ⋅v²運動エネルギー(単位流体体積あたり)静水圧ϱ⋅g⋅h重力位置エネルギー(単位流体体積あたり)「ベルヌーイ方程式に基づく解を使用した演習」の記事では、ベルヌーイ方程式の適用例がいくつか詳しく示されています。
ベルヌーイ方程式は、静圧、動圧、および静水圧の合計は、非粘性かつ非圧縮性の流体では一定であると述べています(ポンプなどの外部源からエネルギーが供給されない限り)。これらの圧力の一定の合計は、全圧力 ptot とも呼ばれます。ベルヌーイ方程式を適用すると、流線に沿って移動する流体要素を常に想像できます。次に、ベルヌーイ方程式は、この流線上の 2 つの任意の点の状態を結び付けます。
ベルヌーイ方程式は、流線に沿って静圧、動圧、静水圧の合計が一定であることを示しています。この形式では、外部エネルギーの供給がない、摩擦のない (非粘性) 非圧縮性の流れにのみ適用されます。
流体の粘度 (内部摩擦) により、完全に摩擦のない流れはないことに注意してください。実際には、これはエネルギーの散逸を意味し、追加の(静的)圧力損失を伴います。これについては後ほど詳しく説明します。
重要な注意事項
ベルヌーイ方程式は(体積固有の)エネルギー方程式であることを理解することが重要です。これは、式 (\ref{1}) から式 (\ref{2}) へのステップによるもので、さまざまな形のエネルギー (圧力エネルギー、運動エネルギー、重力位置エネルギー) が流体の体積 ΔV に関連付けられています。 圧力 としての表示 というのは、ベルヌーイ方程式に現れる個々の項は、それぞれが圧力の次元を持っているため、形式的な性質を持っているだけだからです。ただし、 これらのプレッシャーは常に心に留めておく必要があります。 エネルギーに基づいています。
そうしないと、圧力を「単位面積あたりの力」として古典的に解釈すると、特に動的な圧力に関して誤解が生じることがよくあります。この解釈では、なぜ流速が増加すると静圧が減少するのかを理解するのは非常に困難です。高い流速は大きな「力」を意味し、したがって高圧を意味すると誤って想定されることがよくあります。
しかし、エネルギーとして解釈すると、運動エネルギーの増加は圧力エネルギーを犠牲にしてのみ起こり得ることがすぐに明らかになります。したがって、流速が増加すると静圧は減少します。この現象はベンチュリ効果とも呼ばれ、リンク先の記事で詳しく説明されています。
実際、静水圧という用語は この文脈では、おそらく水柱の静水圧から知られるものとは異なる方法で理解されるべきです。ベルヌーイの方程式では、静水圧を「単位面積あたりの力」として解釈すべきではありません。ベルヌーイ方程式に関しては、高さに対してどの基準レベルが選択されるかに応じて、任意の静水圧を流れ内の点に割り当てることができます。ただし、もちろん、異なる基準レベルが選択されたからといって、流体に作用する力が変わるわけではありません。
この場合、静水圧は再びエネルギー、つまり単位体積あたりに存在する重力位置エネルギーとして解釈されます。この重力位置エネルギーは、選択した基準レベルに依存し、したがって、それによって定義される静水圧にも依存します。
損失を考慮した拡張ベルヌーイ方程式
圧力は(体積固有の)エネルギーの一種であるため、エネルギーの損失は必然的に圧力の損失を意味します。このような圧力損失は、あらゆる流体が一定の粘度を持っているために発生します。いわゆるノンスリップ状態により、パイプ壁の流体層がパイプ壁に付着します。 したがって、流体が流れるには、さらに内側の層が互いに移動する必要があります。これにより内部摩擦が生じます。 これは最終的にはエネルギーの損失、ひいては圧力の損失を意味します (ポアズイユ流も参照)。
乱流では乱流によりさらにエネルギー損失が発生します。ここではパイプ壁の粗さが重要な役割を果たします。流量損失とそれに伴う圧力損失は、バルブ、パイプベンド、レデューサーなどのパイプシステム内のコンポーネントでも発生します (これについては、記事「パイプシステムの圧力損失」で詳しく説明します)。
したがって、考慮した流れセクションの入口と出口の間の押し出されるエネルギー W2 と押し込まれるエネルギー W1 の差によって与えられる流れの駆動エネルギーは、流れを加速して重力に抗して持ち上げるだけでなく、摩擦も補償する必要があります。したがって、方程式 (\ref{a}) はエネルギー損失項 ΔWloss で拡張する必要があります。
\begin{整列}
&\boxed{W_1 – W_2 =\Delta W_\text{b} + \Delta W_\text{h} + \Delta W_\text{loss}} \\[5px]
\end{整列}
したがって、方程式 (\ref{1}) は次の一般的な形式になります。
\begin{整列}
&\underbrace{p_1 {\Delta V} – p_2 {\Delta V}}_{\text{圧力エネルギー}} =\underbrace{\frac{1}{2} \rho {\Delta V} v_2^2 – \frac{1}{2} \rho {\Delta V} v_1^2}_{\text{運動エネルギー}} + \underbrace{\rho {\Delta V} g h_2 – \rho {\Delta V}g h_1}_{\text{重力位置エネルギー}} + \underbrace{\Delta W_\text{損失}}_{\text{エネルギー損失}}\\[5px]
\end{整列}
この方程式を流体体積 ΔV で割ると、エネルギー損失を考慮した拡張ベルヌーイ方程式が求められます。
\begin{整列}
&\boxed{p_1 + \frac{1}{2} \rho v_1^2 +\rho g h_1=p_2 + \frac{1}{2} \rho v_2^2 + \rho g h_2 + \Delta p_\text{loss}}~~~\text{where}~~~\boxed{\Delta p_\text{loss} =\frac{\Delta W_\text{損失}}{\Delta V}} \\[5px]
\end{整列}
項 Wloss/ΔV は単位体積あたりのエネルギー損失に相当するため、圧力損失 Δploss を表します。動圧と静水圧は流速と高さによってあらかじめ決まるため、このような圧力損失は基本的に静圧でのみ顕著になります。下流の静圧 p2 は、この圧力損失によって減少します。
\begin{整列}
&p_2 =p_1 + \frac{1}{2} \rho \left(v_1^2-v_2^2\right) +\rho g (h_1-h_2) \color{red}{- \Delta p_\text{loss}} \\[5px]
\end{整列}